مهندس برتر
آموزش نیاز های ((اصلی و فرعی)) مهندس مکانیکمهندس برتر
آموزش نیاز های ((اصلی و فرعی)) مهندس مکانیکمعرفی کتاب دانش کاربردی طراحی و ساخت ربات
نام کتاب : دانش کاربردی طراحی و ساخت ربات
مولفان : مهندس پویا حیرتی، مهندس ابوذر آقا جانی، مهندس محمد چیت سازان
ناشر : انتشارات آذرخش
ناشر همکار : انتشارات ارس رایانه
تعداد صفحه: ۴۵۲
شابک : ۰-۷۹-۶۲۹۴-۹۶۴-۹۷۸
رده بندی کنگره : ۲د۹ح/TJ۲۱۱
شماره ثبت کتابخانه ملی :۸۶۱۴۵۳ح
چاپ اول : اردیبهشت ۱۳۸۷
سر فصل های این کتاب عبارتند از:
فصل اول: مکانیسم های متداول در ربات های متحرک
فصل دوم: بازوی مکانیکی سیار
فصل سوم: معرفی ربات پرنده و قطعات اساسی آن
فصل چهارم: مقدمه ای بر ربات های صنعتی
فصل پنجم: سیستم شاسی متداول
فصل ششم: مسائل موثر در وزن ربات
فصل هفتم: معرفی قطعات مکانیکی کاربردی
فصل هشتم: آشنایی با پنیوماتیک
فصل نهم:سیستم های سخت افزاری بینایی و شنوایی ربات
فصل دهم: استاندارد سازی طراحی ربات
فصل یازدهم: معرفی برخی از تکنیک های ساخت قطعات
پی نوشت:
- این کتاب، تنها کتاب موجود در بازار کتاب است که توسط یک ((مولف)) ایرانی و بر اساس شرایط و امکانات موجود در ایران و با استفاده از تجربه های عملی آزمایش شده نوشته شده است.
- متاسفانه چاپ این کتاب متوقف شده است و برای تهیه آن باید حضورا به دفتر انتشارات آذرخش مراجعه فرمایید. آدرس: تهران - خیابان انقلاب اسلامی - مقابل دانشگاه تهران - جنب خیابان دانشگاه - پاساژ فرشته - شماره ۱۳۲۰ شماره تماس : ۶۶۴۹۳۳۰۱ و 09127035576

کتاب گریپر ربات ها
نیرویی که توسط یک گریپر رباتیک به قطعه کار اعمال میشود، اصولاً توسط مهندسین علم رباتیک محاسبه و گریپر مناسب انتخاب میشود. عموماً نیروی گریپر به عنوان اولین شاخص مورد نظر قرار میگیرد، اما به دلیل اهمیت گشتاور اعمالی از طرف گریپر، این موضوع نیز باید در نظر گرفته شود. در برخی موارد، گشتاوری که از طرف گریپر به قطعهکار وارد میشود، توسط جداولی که سازندگان گریپرهای استاندارد به مشتری ارائه میدهند، قابل محاسبه و استخراج است. این جداول بسیار مفیدند، اما تنها بهعنوان یک راهنما میتوان از آنها بهره جست زیرا فاقد دقت لازم برای انتخاب بهترینها هستند. بنابراین، گاهی مشاهده میشود که به دلیل عدم دقت در طراحی و انتخاب صحیح گریپرها، قطعات از روی گریپرها رها شده ویا آنقدر گریپر بزرگ یا اصطلاحاً Over Design در نظر گرفته شده که تبعات افزایش هزینه را به دنبال خواهد داشت. در این کتاب، سعی شده است که نحوه محاسبه نیرو و گشتاور مورد نیاز برای یک گریپر رباتیک و سایر پارمتر های مهم طراحی آن، به روشی ساده معرفی شود.
لینک دانلود این کتاب به علت رعایت قانون کپی رایت از روی سرور حذف شد
Was Removed from The Server Due to CopyRight Law
معرفی کتاب ساخت اجزاء ربات
نام کتاب : ساخت اجزاء ربات
مولفان : Gordon McComb
مترجم : مهندس امین خوش نیت آرام
ناشر : انتشارات شهرآب
ناشر همکار : انتشارات نشر روز
تعداد صفحه: ۲۸۶
شابک : ۰-۸۷-۶۱۳۱-۹۶۴-۹۷۸
رده بندی کنگره : س۷۴م/TJ۲۱۱
شماره کتابشناسی ملی : ۲۰۳۰۱۶۵
توضیحاتی مختصر در مورد کتاب :
این کتاب اولین کتاب از دوره ۳ جلدی آموزش مباحث رباتیک DNA می باشد.
نویسنده مشهور کتاب های رباتیک آماتوری گوردن مک کامب در این کتاب کوشیده است هر آنچه را که یک خواننده مشتاق برای پیاده سازی ایده ذهنی اش نیاز دارد به زبان ساده بیان نمایید.ضمنا با معرفی طیف وسیعی از ابزار , مواد گوناگون, شیوه های ساخت و ... شما را در دستیابی به طرحی عملی و علمی از یک ربات که بتواند با حداقل امکانات پیاده سازی شود , یاری می رساند.
صرف نظر از مدارهای کنترلی و سیستم های پیشرفته حرکتی , سایر اطلاعات مورد نیاز جهت ساخت بخش های مختلف یک ربات اعم از ساختارهای مختلف مکانیکی , نحوه انتخاب مواد مورد استفاده در ساخت قطعات , چگونگی استفاده از آنها و ... را میتوان در این کتاب یافت.
به بیان ساده , اطلاعات این کتاب نقطه شروع کسانی است که قصد ساخت ربات های آماتوری جهت پروژه های دانشجویی , دانش آموزی و یا شرکت در مسابقات رباتیک را دارند.
به منظور مشاهده سر فصل های کتاب به ادامه مطلب مراجعه فرمایید...
ادامه مطلب ...
معرفی کتاب خودآموز روباتیک-اصول اولیه و پروژه های کاربردی ساخت روبات
نام کتاب: خودآموز کامل روباتیک، اصول اولیه و پروژه های کاربردی ساخت ربات
مولفان : مهندس علیرضا محمدی و مهندس علیرضا احمدیبزرگ
ناشر: نشر آفرنگ
تعداد صفحات: ۳۲۰
شابک :۰-۱۴-۵۰۶۰-۶۰۰-۹۷۸
رده بندی کنگره :۹خ۳م/TJ۲۱۱
شماره کتابشناسی ملی : ۱۶۹۴۶۰۴
تاریخ انتشار : ۱۳۸۸
توضیحاتی مختصر در مورد کتاب : این کتاب که حاصل سالها تجربه نویسندگان آن در زمینه ساخت انواع روباتها، شرکت در مسابقات روباتیک مختلف و تدریس در دورههای آموزشی میباشد، شامل مباحثی کاربردی درباره روباتیک است که تمام اجزای یک روبات از جمله مکانیک، الکترونیک، کنترلکنندهها، موتورهای الکتریکی و حسگرها را بررسی میکنند. کنترلکننده مورد استفاده در پروژههای کتاب، میکروکنترلر AVR میباشد که نحوه برنامهنویسی آن توسط دو کامپایلر CodeVisionAVR و BASCOM-AVR توضیح داده شده است. همچنین نحوه ساخت یک روبات امدادگر جونیور برای شرکت در مسابقات روبوکاپ و چگونگی شرکت در مسابقات مختلف روباتیک شرح داده شدهاند. هر فصل از این کتاب، شامل تمرینها و پروژههای کاربردی متعدد است که برای معرفی هرچه بهتر مفاهیم المانهای الکترونیکی و مکانیکی ارائه شدهاند. مطالب و پروژههای ارائهشده، از سطح مبتدی تا سطح پیشرفته توضیخ داده شدهاند و به همین علت طیف وسیعی از خوانندگان، از دانشآموزان تا دانشجویان، میتوانند از آن بهره ببرند.
به منظور مشاهده سر فصل های کتاب به ادامه مطلب مراجعه فرمایید...
معرفی سایت EXPO21XX - نمایشگاه ((آنلاین)) رباتیک
این سایت نمایشگاه دائمی و آنلاین تمام دانشگاههای معتبر رباتیک همچون ماساچوست، کارنگی ملون، اوزاکا ژاپن و ... است، حتی قطب رباتیک دانشگاه شریف هم در این نمایشگاه سالن (Hall) دارد و جدیدترین کارهای علمی خود را به صورت عکس و فیلم ارائه می دهد.
هر دانشگاهی که تحقیقات بیشتر و جالبتری داشته باشد در صدر قرار میگیرد مانند آزمایشگاه بیو رباتMIT، دانشگاه مک گیل کانادا، EPFL، دانشگاه پلی تکنیک لوزان سویس و ...، همه و همه هستند و انواع رباتها در این نمایشگاه آنلاین وجود دارد.
برای ورود به این سایت روی تصویر زیر کلیک کنید:
باز کردن فایل های ۳بعدی سالیدورکس در تبلت و گوشی های اندروید DS SOLIDWORKS eDrawings 2.2.0
![]()
تنها نرم افزاری در گوشی و تبلت های اندروید که به شما امکان مشاهده فایل های CAD سه بعدی و دو بعدی سالیدورکس (پارت و اسمبل و درایینگ) را می دهد. این نرم افزار به طرز فوق العاده ای اشتراک اطلاعات طراحی را ساده می کند. شما می توانید جهت اشتراک گذاری هرچه ساده تر فایل های طراحی با همکاران خود( خصوصا کسانی که کاربران عادی نرم افزار های CAD نیستند و این نرم افزار را روی سیستم کامپیوتر خود نصب ندارند) فایل ها را به آن های ایمیل کنید. همچنین می توانید در کارگاه ها و مکان هایی که به کامپیوتر یا لبتاپ خود دسترسی ندارید از این نرم افزار استفاده کنید و فایل های طراحی ۳بعدی و نقشه های ۲بعدی خود را همه جا بهمراه داشته باشید و در صورت نیاز به سادهترین شکل ممکن از آنها استفادهکنید.

قابلیت حرکات چند لمسی این امکان را به شما می دهد که به راحتی Zoom , Pan , Rotate انجام دهید. این نرم افزار همچنین از drawing sheet ها و نماهای انفجاری برای فایلهای منتشر شده توسط سالیدورکس، پشتیبانی میکند.


اجزاء، مکانیزم، سیستم، ماشین
می دانیم که رباتیک یک حوزه بین رشته ای است که از بهم پیوستن علوم مختلف مانند: الکترونیک، کامپیوتر و مکانیک شکل گرفته است بنابراین آشنایی با هر یک از این حوزه ها برای شناسایی دقیق حوزه رباتیک ضروری به نظر می رسد.
یکی از علومی که دانش رباتیک از آن نشات گرفته مهندسی مکانیک است. مهندسی مکانیک به شکل ساده وظیفه طراحی و ساخت اسکلت اصلی ربات را بر عهده دارد...
شبیه سازی روباتیک بازوی اختاپوسها
دانشمندان موفق به شبیه سازی روباتیک ساختار ماهیچه ای غیر عادی بازوی اختاپوسها شده اند، ساختاری که مشابه آن را تنها در زبان جانداران و خرطوم فیلها می توان دید.
به گزارش خبرگزاری مهر، گروهی از دانشمندان اروپایی رویای ساخت اختاپوسی روباتیک را در ذهن دارند که روزی می تواند جان انسانها را نجات دهد. نجات جان انسانها یکی از کاربردهای روبات اختاپوسی است که می تواند در کنار مسیریابی در زیر آب دریا و جا به جا کردن اجسام انجام دهد. اولین قدم برای ساخت این روبات نیز خلق یکی از بازوهای اختاپوس است.
محققان کالج سنت آنا در پیزا این بازو را به عنوان بخشی از پروژه ای بزرگتر خواهند ساخت که بودجه آن توسط کمیسیون اروپا تامین می شود. ساخت روباتهای کاربردی با بدنی مشابه نرم تنان یکی از دشوارترین پروژه های مهندسی به شمار می رود زیرا روباتها ذاتا با استفاده از مواد سخت ساخته می شوند در حالی که فناوری لازم برای ساخت بدنه ای لطیف و غیر سخت برای روباتها هنوز چندان توسعه نیافته است.
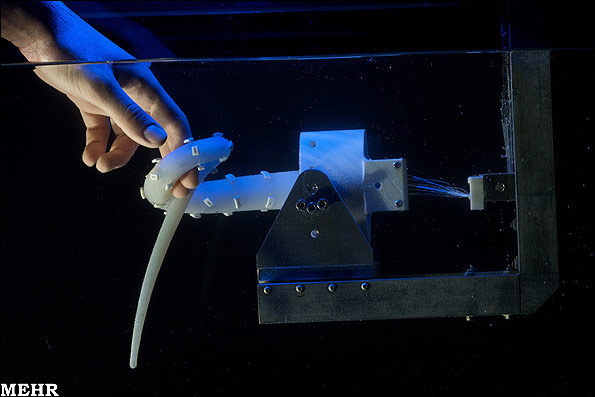
اختاپوسها از ساختار ماهیچه ای عجیبی برخوردارند که به صورت طبیعی در ساختار زبان و یا خرطوم فیلها یافت می شوند، محققان با مطالعه بر روی حرکات اختاپوسها دریافتند بازوی این جانداران برای وارد آوردن فشار به منظور گرفتن و جا به جا کردن اجسام کوتاه و بلند می شوند.
نمونه آزمایشی این روبات طولی برابر 17 اینچ دارد و از ساختار بدن اختاپوسهای مدیترانه ای شبیه سازی شده است. این بازوی ضد آب از مواد سیلیکونی ساخته شده و از درون آن کابلهایی فلزی به دسته ای از کابلهای نایلونی وصل شده اند. با ایجاد تغییر در این کابلها بازو می تواند اجسام مختلف را بگیرد. اصطکاک موجود در لایه خارجی سیلیکونی به اندازه ای است که نیاز به اجزای مکنده که در بدن اختاپوسها یافت می شود را از بین خواهد برد.
بر اساس گزارش دیسکاوری، چنین روباتی می تواند در زمینه های مختلفی کاربرد داشته باشد، برای مثال گروهی از پزشکان مشتاقند از این فناوری به عنوان ابزار آندوسکوپی ایمن تر استفاده کنند. همچنین می توان از این روبات در انجام عملیات امداد و نجات انسانها در زیر آب استفاده کرد.
بررسی انواع مکانیزم ربات های متحرک برای سطوح ناهموار
از ابتدای پدید آمدن ربات ها ، ساخت رباتی که بتواند روی زمین های ناهموار حرکت کند ، به عنوان یکی از خواسته های اصلی محققان و علاقه مندان علم رباتیک مطرح بوده است در نتیجه فعالیت های مختلفی در این خصوص با عنوان کلی ربات های متحرک انجام پذیرفته است .

مقاله بررسی انواع مکانیزم های ربات های متحرک برای حرکت در سطوح ناهموار نوشته امین انصاری و مهندس مهدی قنواتی ضمن بررسی و تعریف ربات ، به بررسی انواع ربات برای زمین های ناهموار پرداخته و انواع ناهمواری های زمین را بررسی خواهد کرد . در ادامه یک تعریف کلی و جامع از ربات را بیان می کند سپس در مورد ناهمواری های زمین و انواع ربات های مربوطه به تفصیل صحبت خواهد کرد.
منبع: رویاک ربات
برای عصر روباتهای خودمختار آمادهاید؟

بهنوش خرمروز: دفعه بعدی که از پله برقی استفاده میکنید، به یاد بامپر هریس، مرد جوانی که تنها یک پا داشت، بیفتید که در سال 1911 / 1290 توسط شرکت متروی لندن استخدام شد تا تمام روز را روی پلههای برقی جدید بگذراند و به رهگذران عصبی نشان بدهد که آنها امن هستند. امروزه ما ماشینی شدن را بیشتر مفید میدانیم تا تهدیدکننده. اما اگر این ماشینهای برنامهریزیشده برای اطاعت از فرمان انسانها تغییر رویه دهند و به سیستمهایی خودمختار با قابلیت یادگیری، تصمیمگیری و اقدامات خودسرانه تبدیل شوند، همه ناراضی خواهند بود.
به گزارش نیوساینتیست، آکادمی سلطنتی مهندسی بریتانیا در گزارش این هفته خود، از رسانهها و دولت خواسته است آگاهی عمومی را نسبت به سوالات پیچیده اجتماعی، اخلاقی و قانونی که سیستمهای خودمختار به بار میآورند، افزایش دهند. اما آیا واقعا به چنین بحثی نیاز داریم؟ یا با این کار صرفا پدیدار شدن فناوری پیشرفتهای را به عقب میاندازیم که فواید بسیاری برای عرضه خواهد داشت؟
مرغ دریایی رباتی شگفت انگیز
شرکت festo یک مرغ دریایی رباتی شگفت انگیز ساخته است. این مرغ دریایی پروازی بی نظیر و خودمختار در درون و بیرون ساختمان دارد و از مرغ دریایی الهام گرفته شده است.
گفته های شرکت در این باره:
این مرغ هوشمند بسیار سبک است و در عین حال قدرت پرواز بالایی دارد. همچنین آیرودینامیک عالی دارد. این ربات می تواند پرواز کند و بنشیند بدون هیچ مکانیزم کنترلی بیرونی. بالهای آن نه تنها بال می زند بلکه پیچ و تاب هم می خورد. فستو برای اولین بار موفق به استفاده ار تکنولوژی سیستم استفاده بهینه انرژی در یک مدل طبیعی شده است. این ربات یک متر طول وزن نیم کیلوگرم و دارای 2 متر طول بالهاست.
این فیلم بی نظیر را در یوتیوب ببینید از این مرغ دریایی رباتیک
http://www.youtube.com/watch?feature=player_embedded&v=9YGLZXEwRVcدعوت به همکاری گره رباتیک A.R.T
این گروه حدود یک سال فعالیت جدی داشته و موفق به اخذ مجوز از مسابقات بین المللی iranopen 2011 لیگ مین یاب دستی شده است.به 3 نفر جهت فعالیت در زمینه های
1)مکانیک(لزوما ساکن اهواز)
2)الکترونیک(لزوما ساکن اهواز)
3)برنامه نویسی(ساکن اهواز)
نیازمند است.جهت کسب اطلاعات بیشتر لطفا ایمیل بدهید.

مسابقات رباتیک ایران اپن ۲۰۱۱
سلام دوستان.از امروز این دور از مسابقات در محل نمایشگاه بین المللی تهران آغاز به کار کرد.

روبات جنگی crusher ،این رویای منه،سیستم تعلیق یعنی این!!!!!
اما سازندگان این خودرو، غیر از سرنشین بودن آن انتظارات بیشتری دارند. از جمله تانکی که بصورت بی صدا بتواند بار زیادی را حمل و نقل کند . دفاع از خود در برابر دشمنان ، به سرعت رها کردن خود از گیر کردن در دره ها و تپه ها از دیگر اهداف است ...


کتاب آنالیز مکانیزم ها و ربات ها با MATLAB (همراه با CD )
آنالیز مکانیزم ها و ربات ها با MATLAB (همراه با CD )
| |||
موضوع: | |||
| |||
پدیدآورنده: | |||
| |||
ناشر: | |||
ناقوس | |||
424 صفحه - وزیری (شومیز) - چاپ 1 - | |||
978-964-377-430-1 | |||
تاریخ نشر:1389 | |||
چکیده : دینامیک دینامیک ماشین ارتعاشات طراحی مکانیزمها دینامیک پیشرفته طراحی مکانیزمهای پیشرفته رباتیک پیشرفته (سینماتیک و دینامیک رباتها) به کمک نرمافزار MATLAB قابل حلاند. آنالیز مکان و سرعت و شتاب مکانیزم و ربات ها , رسم شماتیک مکانیزم ها و ربات ها و خط سیر حرکت اجزاء آنها , ساختن یک انیمیشن از حرکت مکانیزم و ربات ها , آنالیز نیروی مکانیزم ها و ربات ها به روش نیوتن - اولیر و دالامبر , یافتن معدلات حرکت مکانیزم ها و ربات ها و حل این معادلات به روش نیوتن و لاگرانژ و دینامیک کین , دینامیک مستقیم و معکوس ربات های سری , ویژه دانشجویان مهندسی مکانیک , مکاترونیک و رباتیک. | |||
روباتهای راننده به بازار می آیند
دانشمندان در حال طراحی نسل جدید خودروهای هوشمند هستند که بوسیله روبات ها هدایت می شوند. این خودروها در سال 2030 واراد بازار های جهانی خواهند شد.
ادامه مطلب ...
روباتها هم پژوهش میکنند

نخستین روبات دانشمند توانسته است فرضیه های خودش را ایجاد کند و به تجربه آنها بپردازد. بدین ترتیب، روباتها نیز موفق شدند اولین مراحل اکتشاف علمی را در دنیای واقعی با موفقیت پشت سر بگذارند.
مسابقات RAADCUP
سلام سلام سلام , سلام به شما عاشقان روباتیک , امیدوارم حالتون خوب باشه.
از امروز مسابقاتی به نام رعدکاپ در اصفهان شروع میشه که تعداد زیادی تیم در این مسابقات شرکت می کنن. یکی از این تیم ها از بچه های دانشگاه خودمون یعنی دانشگاه صنعتی جندی شاپور تشکیل شده , این تیم 5 نفره ربات مسیر یاب خودشونو طی تلاشهای شبانه روزی در مدت 4 ماه ساختند و من شخصا شاهد تلاش انها بودم.لازم به ذکره که بچه ها کاملا خصوصی و بدون پشتیبانی جایی به این مسابقات رفتن.بچه ها امروز مسابقه دارن . برای این عزیزان آرزوی موفقیت می کنیم . شما هم براشون دعا کنید.
اعضای تیم MechaStars : آقایان ایمان سودمند, عماد میاحی,رهام عساکره,محمد باوری, علی وحیدی