مهندس برتر
آموزش نیاز های ((اصلی و فرعی)) مهندس مکانیکمهندس برتر
آموزش نیاز های ((اصلی و فرعی)) مهندس مکانیکعلم رباتیک
●تضاد رباتیک با مکاترونیک تضاد خودمختار با خودکار●
مکاترونیک یک رشته ی چند تخصصی ، شامل رشته های مهندسی مکانیک ، مهندسی الکترونیک و مهندسی کامپیوتر است . مکاترونیک از دو کلمه ی "مکا" مخفف مکانیک و "ترونیک" مخفف الکترونیک مشتق شده است . رباتیک نیز همانند مکاترونیک از سه رشته ی مهندسی مکانیک ، مهندسی الکترونیک و مهندسی کامپیوتر بوجود آمده است .
به عنوان مثال چراغ راهنمایی و رانندگی و ماشین لباسشویی ، سیستم های مکاترونیکی هستند . در چراغ راهنمایی و رانندگی وقتی انسان دکمه ای را فشار می دهد رنگ چراغ تغییر می کند و در ماشین لباسشویی دمای آب ، زمان و ... به آن داده شده است. حتی وقتی چراغ راهنمایی و رانندگی در حالت خودکار قرار می گیرد و بدون نیاز به فشردن دکمه ای ، کار می نماید . هنوز به عنوان سیستم مکاترونیکی شناخته می شود چون ورودی هایش (زمان روشن بودن هر رنگ) برایش فراهم گردیده است . این فرایند ، خوکار (اتوماتیک) نامیده می شود . آن چه گفته شد در تضاد است با حالتی که چراغ راهنمایی و رانندگی دارای یک دوربین جهت تشخیص مردمی که می خواهند از عرض خیابان شوند باشد و رنگ چراغ را با توجه به فشردگی جمعیت تغییر دهد. آن چه گفته شد یک سیستم رباتیک است . این فرایند را خودمختاری (اتونوموس) گویند .

>>تاریخچه ی رباتیک

در گذشته کشورهای استعمارگر برای افزایش سرمایه وپیشرفت خود به کشور های ضعیف حمله می کردند و با تصرف کشور قربانی ، مردم آنجا را به عنوان برده به خدمت می گرفتند و از آنها به عنوان نیروی کار رایگان بهره می بردند و آنها را در مزارع کارخانه ها آشپزخانه ها و... به کار می گرفتند . اما این برده ها چند عیب بزرگ داشتند . مهمترین عیب آن اسارت یک انسان و ظلم به او بود و دیگر عیب آن خستگی برده ها بود . برده ها نمی توانستند ۲۴ ساعت شبانه روز کار کنند . باید به آن ها وقت استراحت می دادند . دیگر عیب آن ها این بود که ارباب باید آن ها را مداوم کنترل می کرد . در آن زمان آرزوی اربابان این بود که برده ای غیر انسانی داشته باشند که بتواند ۲۴ ساعته کارکند و دچار خستگی نشود و نیاز به کنترل مداوم نداشته باشد . با توجه به علم آن زمان این رویایی بیش نبود و فقط در تئاتر به نمایش در می آمد و به این برده های آسمانی (( ربات )) می گفتند .
با پیشرفت علوم در طی گذشت زمان و انقلاب صنعتی اروپا ، نیاز به برده هایی بیشتر با سرعت بالاتر دقت بیشتر و خستگی کمتر ، بیشتر احساس می شد . بنابراین دانشمندان به فکرساخت ماشین های خود کار افتادند . (تا آن زمان علم در زمینه ی برق و مکانیک مقداری پیشرفت کرده بود . ) از آن به بعد در قسمت هایی از کارخانه ها از ماشین های الکترومکانیکی استفاده می شد . بدین شکل مکانیزاسیون صنعتی آغاز شد . عیب بزرگ این دستگاه ها تک منظوره بودن و عدم انعطاف پذیری آن ها بود . یعنی با تغییر قسمتی از کارخانه یا محصول تولیدی می بایست کل دستگاه ها دوباره طراحی می شدند . با پیشرفت هر چه بیشتر علم ، کامپیوتر ها اختراع شدند و گسترش یافتند . تا حدی که در خانه ها نیز یافت می شد . سپس صنعت گران به فکر ترکیب ماشین ها ی الکترومکانیکی با کامپیوتر ها افتادند تا بتوان آن ها را برنامه نویسی کرد [ یکی از ویژگی های کامپیوتر قابل برنامه نویسی بودن آن است ] و بایک دستگاه بتوان چندین کار را انجام داد (مثلا دستگاهی که یک نوع ماشین را رنگ می زند بتواند با عوض شدن مدل و طرح آن ، آن ها را نیز رنگ بزند ) . بدین صورت ربات ها ساخته شدند.
●سال شمار رباتیک
1960:Unimation توسط شرکت Coudocخریداری شد و توسعه ی سیستم ربات های آن آغاز گردید. کارخانجات ساخت تراشه مانند AMF پس از آن شناخته شدند و اولین ربات استوانه ای شکل به نام versatran که توسط sJohnson Harry kovic veljkomilen طراحی شده بود به فروش رفت.
1962:جنرال موتورز اولین ربات صنعتی را از unimation خریداری کرد و آن را در خط تولید خود قرار داد.
1963: John Mccarthy آزمایشگاه هوش مصنوعی دیگری از داتشگاه استنفورد بنا کرد.
1964:آزمایشگاه های تحقیقاتی هوش مصنوعی در M.I.T موسسات تحقیقاتی استنفرد(SRI) دانشگاه استنفورد و دانشگاه ادین برگ گشایش یافت.
1964:رباتیک Dc پایه گذاری شد.
1965:دانشگاه Canegie Mellon موسسه ی رباتیک خود را تاسیس کرد.
1965:حرکت یکنواخت (Formation Homogeneos Trans) در شناخت نحوه ی حرکات ربات به کار رفت . این روش امروزه به عنوان نظریه اسامی رباتیک وجود دارد.
1965:ژاپن ربات verstran (نخستین رباتی که وارد ژاپن شد) را از AMF خریداری کرد.
1968:کاوازاکی مجوز طرحی ربات های هیدرولیک را از Unimation گرفت و تولید آن را در ژاپن آغاز کرد.
1968:SRI. Shakey ( یک ربات سیار با قابلیت بینایی و کنترل با یک کامپیوتر به اندازه ی یک اتاق)را ساخت.
1970:پروفسور victor sheinman از دانشگاه استنفورد بازوی استاندارد را طراحی کرد ساختار ترکیب حرکتی او هنوزهم به بازوی استاندارد معروف است.
1973:cincinnate Milacron اولین مینی کامپیوتر قابل استفاده ی تجاری که با رباتهای صنعتی کنترل می شد(T3) را عرضه کرد.(طراحی توسط Richard Hohn)
1974:پروفسورvictor sheinman سازنده ی بازوی استاندارد Inc vicramرا جهت فروش یک نسخه برای کابردهای صنعتی ساخت.بازوی جدید توسط یک مینی کامپیوتر کنترل می شد.
1976:vicram Inc در کاوشگر فضایی وایکینگ 1و2 استفاده شد.یک میکرو کامپیوتر هم در طراحی vicram به کار رفت.
1977:یک شرکت ربات اروپایی (ASEA) دو اندازه از رباتهای قدرتمند الکتریکی صنعتی را عرضه کرد که هر دو ربات از یک کنترل میکروکامپیوتر بری برنامه ریزی عملکرد خود استفاده می کردند.
1977:,Inc Unimation vicram را فروخت.
1978: Unimationبا استفاده از تکنولوژی (vicam puma) ماشین قابل برنامه ریزی برای مونتاژ (puma) را توسعه داد.امروزه همچنان می توان (puma) را در بسیاری از آزمایشگاههای تحقیقاتی یافت.
1978:ماشین خودکار Brooks تولید شد.
1978:IBM ,SANKYO ربات با بازوی انتخاب کننده ی مفصلی(SCARA) که در دانشگاه yamanashi ژاپن برنامه ریزی و تولید شده بود را فروختند.
1980: Cognex تولید شد.
1981:گروه رباتهای CRS عرضه شد.
1982:Fanuc از ژاپن و جنرال موتورز GM Fanuc برای فروش ربات در شمال آمریکا قرارداد بستند.
1983:تکنولوژی Adept عرضه شد.
1984:Joseph Engelberger ایجاد تغییرات در رباتیک را آغاز کرد و پس از آن نام رباتهای کمکی (Helpmate) به رباتهای خدماتی توسعه یافته
(deveioped service Robots) تغییر یافت.
1986:با خاتمه یافتن مجوز ساخت unimation کاوازاکی خط تولید رباتهای الکتریکی خود را توسعه داد.
1988:گوه Unimation staibli را از Westing house خرید.
1989:تکنولوژی Sansable عرضه شد.
1994:یک ربات شش پا از موسسه ی رباتیک CMU یک آتشفشان در آلاسکا را برای نمونه برداری از گازهای آتشفشانی کاوش کرد.
1997:ربات راه یاب مریخ ناسا زمانی که ربات وارد مریخ شد تصاویری از جهان را ضبط و ربات سیار Sojourner تصاویری از سفرهایش به سیاره های دور را ارسال کرد.
1998:Honda نمونه ای از P3 (هشتمین نمونه در پروژه طراحی شبیه انسان) که در 1986 آغاز شده بود را عرضه کرد.
2000: Honda نمونه آسیمو نسل بعدی از سری رباتهای شبیه انسان را عرضه کرد.
2000: Sonyاز ربات شبیه انسان خود که لقب Dream Robots sony(SDR) را گرفت, پرده برداری کرد.
2001:sony دومین نسل از ربات های سگ Aibo را عرضه کرد.
2001:سیستم کنترل از راه دور ایستگاه فضایی (SSRMS) توسط موسسه رباتیک MD در کانادا ساخته و با موفقیت به مدار پرتاب شد و عملیات تکمیل ایستگاه فضایی بین المللی را آغاز کرد.
>>چرا ربات !؟
دلیل کلیدی که سبب می گردد استفاده از ربات، اقتصادی تر از به کار بردن یک ماشین مخصوص باشد، در انعطاف پذیری ربات است؛ یعنی توانایی آن در انجام گستره ای وسیع از اعمالی که بدان سپرده می شود. این قابلیت، یک ویژگی ارزشمند به شمار می آید؛ چرا که با توجه به درخواست های متغیر و پیاپی صنایع برای اجرای اتوماسیون در فرایند تولید، ربات می تواند به آسانی برای به کار گرفته شدن در یک عملیات جدید آماده شود و راهی عملی را برای انجام زنجیره ای از کارهای تکراری و سنگین فراهم آورد.
با وجود عمر مفید بیست ساله برای هر ربات بازسازی شده و زمان بازگشت سرمایة کمتر از دو سال، ربات ها به لحاظ اقتصادی یک گزینة فنی مناسب به شمار می آیند، به ویژه هنگامی که قابلیت برنامه دهی دوباره به آنها و نیز امکان تجهیزشان با ابزارهای جدید برای انجام کارهای متفاوت در نظر گرفته شود، مشخص می گردد استفاده از ربات چگونه می تواند تغییر برنامة تولید از یک محصول به محصول جدید مورد نیاز بازار را به سهولت امکان پذیر سازد.
●Automation Advantages مزایای استفاده از ربات
هزینه های پایین Low Costs
کیفیت برتر High Quality
کاهش ضایعات تولید Decreased Waste
تکرارپذیری Repeatability
تندی Rapidity
شتاب Acceleration
دقت Precision
سرعت Speed
اطمینان Reliability
سازگاری Consistency
انعطاف پذیری Flexibility
گوناگون سازی Productivity
کار در محیط های خطرناک Hazardous Environments
ایجاد فضای کاری ایمن Secure Work-cell
تولید انبوه Mass Production
زمان تولید طولانی تر Longer Shift Run-time
اشغال فضای کمتر Reduced Floor Space
همسویی با کارگران Compliance with work
>> رباتیک و جایگاه آن در ایران
● مقدمه
رباتیک علمی است که با هدف راحتی انسان و افزایش وقت مفید او به وجود آمده است . متاسفانه در کشور ما آن طور که شایسته است شناخته نشده است . در این مقاله سعی می کنیم به وضعیت ایران در علم رباتیک در ایران بپردازیم . بدین منظور ابتدا تاریخچه و تعریف مختصری از ربات ارائه می نماییم . سپس به و ضعیت رباتیک در کشور های صنعتی می پردازیم و سرانجام و ضعیت ایران را بررسی می نماییم و برای بهبود آن راهکاری را مشخص می نمایییم .
● تعریف ربات و رباتیک و مزایای آن
با توجه به توضیحاتی که داده شد :
ربات ماشینی هوشمند ، قابل برنامه نویسی و انعطاف پذیر است که برای بدست آوردن اطلاعاتی از محیط خود دارای حسگرهایی است .
رباتیک علم طراحی ، ساخت ، نگهداری و تعمیر ربات ها است
مهندسی رباتیک علم هوشمند کردن و الکترونیکی کردن ماشین ها ی مکانیکی است ( در جهت مصارف صنعتی ) [مهندسی رباتیک = مهندسی برق + مهندسی مکانیک]
مزایای ربات عبارتند از : افزایش بهره ، افزایش تولید ، بهبود کیفیت کار ، افزایش دقت ، جلوگیری از اتلاف نیروی انسانی ، افزایش سرعت ، کاهش هزینه ، کاهش ضایعات ، چند منظوره بودن ، هوشمند بودن ، عدم خستگی
● مثال هایی از ربات
کلمه ربات مانند کلمه ی ماشین ، یک کلمه ی کلی است و به چند مورد خاص خلاصه نمی شود . به عنوان نمونه چند مورد را ذکر می نماییم :
بازو های ربات های صنعتی ، ربات کنترل چاه های نفت ، یخچال های خانگی ، آسانسور ها ، اسباب بازی کودکان ، هواپیما های بدون سرنشین ، سیستم های دفاع ضد موشکی ، پرینتر ها ، دستگاههای تراش خودکار ، نوشابه پرکن ها و ...
این ها فقط نمونه هایی از بی نهایت انواع ربات بود . ربات ها آنقدر گسترده اند که امروزه نمی توان بدون آن ها زندگی کرد . ولی در مهندسی منظور از ربات ، ربات های صنعتی می باشد .
● رباتیک و کشور های صنعتی
کشور ها صنعتی به این حقیقت رسیده اند ، که کشوری پیشرفت نمی کند مگر این که در تمام علوم پیشرفت کند . بنابراین ، با توجه به این که رباتیک یکی از علوم اصلی سرنوشت ساز قرن است و به آن احساس نیاز می کنند . در این راستا فعالیت های بسیاری را انجام داده اند. آن ها آن قدر پیشرفت کرده اند که هدف خود را اینگونه ذکر می کنند " در سال ۲۰۵۰ ربات هایی خواهیم ساخت شبیه انسان که بتواند با قوی ترین تیم فوتبال انسان ها بازی کند و بدون انجام خطا ، انسان ها را شکست دهد ."
آن ها هر ساله مسابقات رباتیک جهت کسب علم و استفاده نمودن از آن در صنعت برگزار می نمایند .
همچنین در راستای تربیت نیروی انسانی جهت گسترش این علم ، رشته ی مهندسی رباتیک را ایجاد نمودند . مهندسی رباتیک در واقع تلفیقی از رشته ی مهندسی برق و مهندسی مکانیک است که هدف آن تربیت نیرویی که بتواند به تنهایی ربات های صنعتی را طراحی کند و آن را بسازد . این رشته در اکثر دانشگاه های کشور های صنعتی تدریس می شود .
کارخانه های خصوصی آن ها علاوه بر رباتیکی کردن فرایند تولید ، مقداری از درآمد های ناخالص خود را جهت تحقیق و گسترش رباتیک صرف می نمایند .
● وضعیت رباتیک در ایران
وضعیت رباتیک در ایران فاجعه بار است . به طوری که می توان گفت : رباتیک در ایران هنوز شناخته شده نیست . این وضعیت در حالی است که ایران یکی از بزرگترین وارد کنندگان ربات های صنعتی است . هر ساله ارز زیادی بابت خرید ربات ، از کشور خارج می شود . در بیشتر کارخانه های ما از رباتها استفاده می شود . کارخانه هایی مانند فولاد ، خودروسازی ، مواد غذایی و ... را می توان تقریبا تمام رباتیک دانست . اما متاسفانه تمام ربات های آن وارداتی است و حتی نصب و کنترل و تعمیر آن بر عهده ی خارجی ها می باشد
به منظور عقب نماندن کشور در علم رباتیک ، رشته ی مهندسی رباتیک در سال ۱۳۸۱تاسیس شد و متاسفانه تا امسال (۱۳۸۷ ) تنها دانشگاه ارائه کننده ی آن دانشگاه صنعتی شاهرود بود . اکنون این رشته در دانشگاه صنعتی همدان نیز تدریس می شود . اما آیا دو دانشگاه کافی است ؟ پاسخ روشن است با توجه به اهداف کشور و سند چشم انداز ۲۰ ساله هم اکنون باید در تمام دانشگاه های صنعتی ، تدریس شود .
یکی از مشکلات دانش آموختگان این رشته در کشور این است که کسی این رشته را نمی شناسد و اصلا نمی داند ربات چیست . وقتی از ربات صحبت می شود به یاد اسباب بازی آدم آهنی کودکان و فیلم های سینمایی می افتند . دیگر مشکل دانش آموختگان عدم اعتماد صنعت کشور به آن ها است . صنعت گران حاضرند چندیدن برابر آن هزینه کنند ولی از نیروی خارجی استفاده نمایند .دیگر مشکل این رشته کمبود امکانات دانشگاهی و قدیمی بودن امکانات فعلی آن ها است .
بعضی از افراد در ایران استفاده از ربات را مساوی اخراج نیرو کار می دانند و با توسعه ی آن مخالفت می کنند . اما آنها از این قافل هستند که گماردن نیروی انسانی به کار های روزمره و تکراری ، اتلاف نیروی انسانی است . به جای انجام کار بیهوده می توان آن ها را در جایی دیگر به خدمت گرفت .
هر ساله چندین مسابقات رباتیک در سطح کشور برگزار می شود که می توان گفت همه ی آن ها دارای قوانین ثابت و یک شکل و تکراری است و هیچ کدام قوانین بومی ندارند . متاسفانه در ایران به این مسابقات به چشم هدف نگریسته می شود . (بر عکس کشور های صنعتی که مسابقات را ، وسیله ای برای ارتقاء صنعت خویش می دانند . ) و تمام وقت دانشجویان را می گیرند که رباتی با هدف پوچ ( مانند مسیریاب که در این مسابقات ربات باید مسیر خط سیاه را دنبال کند ) بسازند .
متاسفانه هیچ یک از ما ، هیچ روز یا هفته ای در سال را به عنوان هفته ی رباتیک ، حداقل برای یادآوری اهمیت آن بر نگزیده ایم . و برای بهبود وضعیت آن کوششی نکردیم و نمی کنیم .
● نتیجه گیری
اگر می خواهیم ایران به پیشرفت شایسته ی خود برسد . باید موانع را از جلو آن برداریم . در اولین قدم بهتر است در موارد زیر گامی محکم برداریم .
۱) آشنایی مردم با علم رباتیک و مزیت استفاده از ربات ها
۲) تاسیس رشته ی مهندسی رباتیک در تمامی دانشگاه های صنعتی کشور
۳) برگزاری هدفمند مسابقات رباتیک در رشته های بومی در راستای تولید ثروت از راه علم
۴) جلب اعتماد صنعت به نیرو های داخلی
۵) مشخص کردن هفته ای خاص به نام هفته ی رباتیک
۶) و ... .
>>سرمایه گذاری ایران در زمینه ی رباتیک
در حال حاضر فناوری و دانش رباتیک جزو فناوری های پیشرفته محسوب می شود. بر همین اساس کشورهایی که در این زمینه سرمایه گذاری کرده اند، اغلب از لحاظ توسعه این دانش و نیز توسعه صنعتی در شرایط بسیار مناسبی قرار گرفته اند. در این میان ایران در زمره کشورهایی است که استعدادهای بسیاری در زمینه دانش رباتیک در اختیار دارد، اما متأسفانه هنوز این فناوری در کشور به مرحله کاربردی و تجاری سازی نرسیده و دستاوردهای محققان و دانشجویان ما در این حوزه صرفا در مرحله تحقیقاتی باقی مانده است.
در واقع چالش اساسی در این حوزه وجود شکاف عمیق بین مراکز تحقیقاتی و دانشگاه های فعال در زمینه رباتیک با بخش صنعت به عنوان مهم ترین و اصلی ترین بخش در به کارگیری دستاوردهای این حوزه است. این در حالی است که در دنیا رباتیک به لحاظ قابلیت های بسیار مهم از جمله کاهش هزینه ها، افزایش کیفیت، افزایش بهره وری و... نقش اساسی را در صنعت ایفا می کند و بیش از یک دهه است که این فناوری جای خود را در صنعت باز کرده است.
در واقع این که گفته می شود امروز بدون ربات، صنعت معنایی ندارد یک شعار نیست بلکه واقعیتی است که متأسفانه در ایران نادیده گرفته شده است تا جایی که وقتی درباره آخرین وضعیت صنعتی سازی یافته های رباتیک از دبیر شورای عالی علوم، تحقیقات و فناوری سوال می کنیم، او نیز ضمن این که معتقد است به کارگیری این فناوری در صنعت مورد غفلت واقع شده است، به این نکته اشاره می کند که «در حال حاضر تنها کار حرفه ای که در زمینه رباتیک در حال انجام است، قراردادی است که سازمان گسترش با دانشگاه تهران در زمینه ربات سورنا به امضا رسانده است که قراردادی ۲ میلیارد تومانی برای ساخت نمونه آزمایشگاهی است. طبق هدف گذاری که در این مسیر انجام شده این ربات قرار است تا ۲ سال آینده به تولید انبوه و به مرحله تجاری سازی برسد.»
به گفته دکتر مهدی نژاد نوری معاون پژوهشی وزیر علوم، متأسفانه در حال حاضر آمار تفکیکی در زمینه جایگاه ایران در عرصه رباتیک نداریم. وی علت این موضوع را چنین ذکر می کند: «فعالیت هایی که در زمینه رباتیک در کشور انجام می شود، به صورت پراکنده است و این موضوع باعث شده است آمار دقیقی از وضعیت پیشرفت های این فناوری به دست نیاید اما از مسابقات دانشجویی در دنیا استنباط می شود که ایران در زمینه دانش رباتیک وضعیت مناسبی دارد. بنابراین با در نظر گرفتن این موضوع می توان ایران را در ردیف ۲۰ تا ۳۰ کشور اول دنیا به حساب آورد. در حال حاضر در بین اولویت های «ب» نقشه جامع علمی و در بخش فناوری، به فناوری رباتیک با عنوان «خودکارسازی و رباتیک» اشاره شده اما در نقشه جامع هیچ شاخص کمی برای توسعه این دانش مهم و تأثیرگذار قید نشده است و متأسفانه بر خلاف دیگر فناوری ها، برای توسعه دانش رباتیک هیچ سند راهبردی که برنامه ریزی های کوتاه مدت و بلندمدت را مدنظر قرار داده باشد، تدوین نشده است.
رباتیک در ایران متولی ندارد
«دانش رباتیک در ایران متولی ندارد» این جمله ای است که بیشتر صاحب نظران و فعالان عرصه دانش رباتیک بر آن تأکید و از آن به عنوان چالش اصلی و مانعی بر سر راه توسعه این دانش یاد می کنند.
دکتر موسی خانی که ریاست کمیته ملی ربوکاپ ایران را به عنوان نهادی غیردولتی بر عهده دارد، بر این عقیده است که متأسفانه مسئولان ما هنوز به این باور نرسیده اند که دانش رباتیک می تواند در پیشرفت و توسعه کشور نقش کلیدی و اساسی ایفا کند و ما برای حفظ سرمایه های انسانی و کاهش هزینه ها و نیز افزایش کیفیت صنایع باید به سمت استفاده از ربات برویم. بر همین اساس متأسفانه ما متولی که بتواند از حیث تدوین قوانین و مقررات و نیز سیاست گذاری به منظور حمایت از فعالیت های تحقیقاتی از جمله ورود قطعات حامی فعالان این عرصه باشد، نداریم.
موسی خانی با بیان این که روند توسعه این دانش به دلیل بی توجهی مسئولان به کندی پیش می رود، می گوید: ما در ایران چند سالی است که لیگ ربات های مین یاب را به دلیل خطراتی که شناسایی مین به دنبال دارد، طراحی کرده ایم اما متأسفانه با وجود نشست های متعددی که با مسئولان داشتیم به نتیجه ای نرسیدیم و امکان توسعه این دانش را پیدا نکردیم. ما حتی به برخی از واحدهای صنعتی پیشنهاد دادیم که نیازهایشان را به ما بگویند تا ما در قالب مسابقات آن را طراحی کنیم اما متأسفانه این پیشنهاد مورد استقبال قرار نگرفت. البته به دنبال مذاکره هایی که با معاون علمی رئیس جمهور داشته ایم، از ما خواستند که طرح کاملی از آن چه در روبوکاپ اتفاق می افتد، به ایشان ارائه کنیم که این کار انجام شد و هم اکنون برای ارزیابی نهایی در دست بررسی است. رئیس کمیته رباتیک اضافه می کند: ما ۲ سال پیش نامه ای را حضور مقام معظم رهبری تقدیم کردیم که طی آن تقاضا شده بود ورود کالاها و قطعات و تجهیزات مورد نیاز مراکز تحقیقات رباتیک خارج از ثبت سفارش انجام شود چرا که این جریان زمان بر بود و تجهیزات تحقیقاتی رباتیک دائم تغییر می کند و ما نباید زمان را از دست بدهیم. خوشبختانه با حمایت معظم له مشکل حل شد و در حال حاضر برابر ماده ۳۸ قانون صادرات و واردات این مراکز از این پس راحت تر می توانند این تجهیزات راوارد کنند و این جای تشکر بسیار دارد زیرا تاثیر بسزایی در گسترش فعالیت های تحقیقاتی داشت.
تاریخچه دانش رباتیک در ایران
به گفته موسی خانی سابقه راه اندازی رشته رباتیک در دانشگاه های کشور حدود ۶ سال است این در حالی است که سابقه راه اندازی این دوره ها در دانشگاه های دنیا حدود ۲۱ سال است. به طور کلی فعالیت های تحقیقاتی پراکنده در زمینه دانش رباتیک از حدود ۱۴ سال پیش در کشور برای نخستین بار با حضور دانشگاه امیرکبیر و دانشگاه صنعتی اصفهان و در قالب مسابقات رباتیک آغاز شد که از سال ۲۰۰۲ نیز دانشگاه آزاد در این مسابقات شرکت کرد. اکنون این فعالیت ها به طرز چشمگیری گسترده تر شده است به نحوی که در اولین دوره مسابقات مان ۸۰ تیم داشتیم که این تعداد در مسابقات روبوکاپ سال ۲۰۱۱ که در ایران برگزار شد به هزارو ۲۸۰ تیم رسید که ۵۸ تیم هم از ۱۸ کشور جهان در این مسابقات به رقابت پرداختند.
موسی خانی تصریح کرد: هم اینک در مدارس ایران ۱۵۰ انجمن مکاترونیک شکل گرفته است و خوشبختانه بچه های ایرانی اعم از دانش آموزان و بزرگسالان در این عرصه می درخشند، اما در بحث تجاری سازی این دستاوردها در وضعیت خوبی قرار نداریم.
بررسی بازار جهانی ربات های صنعتی
بررسی وضعیت صنعت رباتیک در جهان بی گمان در تصمیم گیری مدیران کلان در این زمینه راه گشا خواهد بود و لزوم سرمایه گذاری را در صنعت رباتیک کشور بیش از پیش نمایان می سازد. دکتر محمد حسین کاظمی که زمانی مدیریت واحد رباتیک یکی از شرکت های خودروسازی کشور را برعهده داشته و هم اینک نیز عضو هیئت علمی دانشگاه شاهد است، با تشریح روند توسعه صنعت رباتیک، درباره وضعیت به کارگیری ربات های صنعتی در جهان و وضعیت سرمایه گذاری جهانی در این زمینه می گوید: تعداد کل ربات های تولید شده تا سال ۲۰۱۰ حدود ۲ میلیون دستگاه است که تقریبا حدود یک میلیون آن ها در حال کاراست. با توجه به آمار به دست آمده عمر مفید ربات به طور متوسط حدود ۱۲ تا ۱۵ سال محاسبه شده است. در سال ۲۰۰۵ حدود ۱۲۶ هزارو ۷۰۰ ربات صنعتی جدید درکشورهای منطقه اروپا، آسیا و آمریکا نصب شده که نسبت به سال ۲۰۰۴ از یک جهش ۳۰ درصدی برخوردار است. در منطقه آسیا نیز علاوه بر خودرو، صنایع قطعات الکترونیک، تجهیزات مخابراتی و رایانه نیز تاثیر بسزایی در گسترش بازار ربات های صنعتی داشته است. به گفته دکتر کاظمی، در سال ۲۰۱۰ فروش ربات تقریبا نسبت به سال ۲۰۰۹ دو برابر شده و به ۱۱۸ هزارو ۳۳۷ عدد رسیده است که صنعت خودرو و صنعت الکترونیک بیشترین سهم را داشته اند. در سال ۲۰۱۰ کشور کره حدود ۲۳ هزارو ۵۰۰ عدد ربات به فروش رسانده است، در این زمینه در این سال در آمریکا رشد ۹۰ درصدی و در کانادا رشد ۱۱۰ درصدی و در اروپا رشد ۵۰ درصدی را شاهد بوده ایم.
صنایع برق و الکترونیک (شامل رایانه، تجهیزات، رادیو، تلویزیون، دستگاه های مخابراتی، تجهیزات پزشکی و ابزارهای اندازه گیری) دومین مشتری بزرگ ربات به حساب می آید. به نحوی که تعداد ۳۰ هزار و ۷۴۵ ربات در سال ۲۰۱۰ در این بخش از صنایع به کارگرفته شده است. صنایع لاستیک و پلاستیک، نوشیدنی و غذایی از نظر استفاده از ربات در رده های بعدی قرار دارند.
چگالی ربات ها
میزان فروش ربات در مناطق مختلف جهان همچنین با شاخص «چگالی ربات» قابل ارزیابی است. این چگالی عبارت است از تعداد ربات های صنعتی به ازای هر ۱۰ هزار نیروی کار در مراکز صنعتی که متوسط جهانی چگالی ربات ۵۱ ربات به ازای ۱۰ هزار نیروی کار است. در حال حاضر کشورهای ژاپن، کره و آلمان با چگالی ربات به ترتیب ۳۰۶ ،۲۸۷ و ۲۵۳ در این زمینه پیشتاز هستند و ما می توانیم این ۳ کشور را در جهان به عنوان کشورهایی با بیشترین سطح اتوماسیون بشناسیم.
اما این چگالی در صنعت خودرو بسیار بالاتر است به طوری که تقریبا به ازای هر ۱۰ کارگر یک ربات وجود دارد. ژاپن و ایتالیا به ترتیب با تعداد هزارو ۷۱۰ و ۱۶۰۰ ربات بر ۱۰ هزار کارگر پیشتاز هستند.
بازار 5.7 بیلیون دلاری فروش ربات در جهان
عضو هیئت علمی دانشگاه شاهد از بازار 5.7 بیلیون دلاری فروش ربات در جهان خبر می دهد و می گوید: باید توجه داشت که این رقم شامل هزینه های مهندسی، نرم افزار و تجهیزات جانبی نیست و اگر این هزینه ها را هم در نظر بگیریم، به عددی حدود ۱۷ بیلیون دلار می رسیم.
وضعیت ربات های صنعتی در ایران
اگر بخواهیم وضعیت ربات های صنعتی در ایران را نسبت به دیگر نقاط جهان مقایسه کنیم، متاسفانه باید بگوییم که آمار دقیق و روشنی مشابه آنچه درباره دیگر کشورها ارائه شد، وجود ندارد. اما می توان با توجه به اطلاعات تجربی موجود، وضعیت ربات های صنعتی را در ایران تا حدی ترسیم کرد. در ایران روند رشد ربات های صنعتی بسیار کندتر از کشورهای متوسط یا حتی ضعیف است. دکتر کاظمی در این زمینه می گوید: در ایران نیز مشابه دیگر کشورها بیشترین سهم بازار ربات در اختیار شرکت های خودروساز است. اگرچه آمار دقیق و رسمی در این زمینه وجود ندارد، اما با برآورد تقریبی، تعداد ربات های موجود و در حال کار را می توان کمتر از ۳ هزار عدد تخمین زد.
نتایج بررسی ها نشان می دهد که در پروژه های اخیر شرکت های خودروسازی، کلیه طراحی ها با استفاده از ربات انجام شده که نمونه آن نصب وراه اندازی خط تولید بدنه خودروی ۲۰۶، بدنه ریو، تندر ۹۰ و... است.
طبق آمار رسمی سازمان ملل، از سال ۲۰۰۳ تا ۲۰۰۵ در مجموع بیش از هزارو ۳۱۹ دستگاه ربات صنعتی به کشور وارد شده که بخشی از آن ربات های نو و بخشی دیگر ربات های کارکرده بوده است که البته تخمین تعداد فعلی حدود ۳ هزار دستگاه است.
سرمایه گذاری مشخصی در حوزه رباتیک نداریم
در شرایطی که بیشتر صاحب نظران یکی از مهم ترین پیش نیازها را برای توسعه دانش رباتیک در کشور «سرمایه گذاری» می دانند متاسفانه در زمینه رباتیک سرمایه گذاری های داخلی بسیار ناچیز و پراکنده بوده است. به نحوی که اگر از سرمایه گذاری های موردی که به منظور پیشبرد برخی طرح های تحقیقاتی انجام گرفته است، بگذریم به نظر می رسد در مجموع برای توسعه دانش رباتیک هیچ سرمایه گذاری مشخص و متمرکزی انجام نشده است. گواه این موضوع اظهار نظر معاون پژوهشی وزارت علوم است که به صراحت اعلام می کند، در زمینه میزان سرمایه گذاری در حوزه رباتیک هیچ آمار مشخصی در دست نیست.
مهدی نژاد علت مشخص نبودن حجم سرمایه گذاری ها در این زمینه را انجام فعالیت های پراکنده در زمینه رباتیک در دانشگاه ها عنوان می کند.
اما رئیس مرکز تحقیق و توسعه وزارت صنایع کشور حجم سرمایه گذاری ایران را در عرصه توسعه دانش رباتیک حدود 1.5 میلیارد تومان تخمین می زند؛ به اعتقاد مهندس طاهباز توکلی، این حجم سرمایه گذاری صرفا مختص انجام فعالیت های تحقیقاتی و ساخت نمونه هایی از ربات هاست که در مسابقات رباتیک مورد استفاده قرار می گیرد که این میزان حتی یک صدم و چه بسا یک هزارم آنچه کشورهای پیشرفته برای توسعه این فناوری هزینه می کنند، هم نیست. این در حالی است که سرمایه گذاری در این حوزه باید کاملا به صورت متمرکز و مشخص انجام شود و در اختیار دانشگاه ها و مراکز تحقیقاتی فعال در این زمینه قرار گیرد.
نویسنده: زهرا حاجیان
>>آشنایی با رشته ی مهندسی رباتیک

رشته مهندسی رباتیک در حقیقت باید تلفیقی از رشته های مهندسی برق گرایش های الکترونیک و کنترل و رشته ی مهندسی مکانیک گرایش جامدات ومهندسی کامپیوتر گرایش نرم افزار باشد ، که مناسب طراحی و ساخت هر رباتی باشد.
اما در واقعیت این گونه نیست . چون در 140 واحد کارشناسی در ایران نمی توان تمام درس های رشته های مذکور درس داده شود . بنابر این نمی توان از یک مهندس رباتیک انتظار داشت به تمامی رشته ها مسلط باشد و بتواند یکربات را از طراحی پیچ ومهره تا کل ماشین و از طراحی مقاومت و آی سی تا کلمدارات را به تنهایی انجام دهد . اما واقعیت رشته ی مهندسی رباتیک درایران چیست ؟
رشته مهندسی رباتیک در سال 1381 در مقطع کارشناسی توسط دانشگاهصنعتی شاهرود وارد ایران شد . چارت رشته مهندسی رباتیک ایران منطبق باچارت مهندسی رباتیک دانشگاه ویکتوریا در استرالیا می باشد . این رشته درواقعیت یکی از گرایش های مهندسی برق است که دانشجویان مقداری از دروس رشتهمکانیک جامدات را نیز می خوانند . هدف این رشته الکترونیکی و هوشمند کردنماشین مکانیکی است . در واقع این رشته برای ساخت یک ربات صنعتی که درصنایع و کارخانجات مورد استفاده قرار می گیرد به وجود آمده است و نه برایساخت ربات های تفریحی وسرگرمی .
درس های تدریس شده به دانشجویان به شرح زیر است :
دروس عمومی 21 واحد
فارسی - زبان خارجه - اندیشه ی اسلامی 1 - اندیشه ی اسلامی 2 - انسان در اسلام - فلسفه ی اخلاق - اخلاق اسلامی - آیین زندگی - عرفان عملی اسلام - تفسیر موضوعی قرآن - تفسیر مضوعی نهج البلاغه - انقلاب اسلامی - قانون اساسی - اندیشه ی سیاسی امام - فرهنگ و تمدن اسلامی - تاریخ اسلام - تاریخ امامت - تربیت بدنی 1 - تربیت بدنی 2 - تنظیم جمعیت
دروس پایه 22 واحد
فیزیک 1 - فیزیک 2 - آزمایشگاه فیزیک 1 - آزمایشگاه فیزیک 2 - ریاضی 1 - ریاضی 2 - معادلات دیفرانسیل - برنامه نویسی - محاسبات عددی
دروس اصلی 61 واحد
نقشه کشی صنعتی - کارگاه ورق کاری و جوش کاری - کارگاه ماشین ابزار - کارگاه برق - زبان تخصصی - کارآموزی تابستان - الکترومغناطیس - ماشین های الکتریکی AC و DC - آزمایشگاه ماشین - مدار های الکتریکی 1 - آزمایشگاه مدار های الکتریکی - مدار های الکترونیکی - آزمایشگاه مدار های الکترونیکی - مدار های منطقی - آزمایشگاه مدار های منطقی - ریاضی مهندسی - تجزیه و تحلیل سیستم ها - کنترل خطی - آزمایشگاه کنترل خطی - استاتیک - دینامیک - دینامیک ماشین - مکانیک سیالات - مقاومت مصالح 1 - مقاومت مصالح 2 - آزمایشگاه مقاومت مصالح - طراحی اجزاء 1 - طراحی اجزاء 2 - پروژه
دروس تخصصی 22 واحد
رباتیک و اتوماسیون - سنسور های ربات - کنترل ربات - آزمایشگاه ربات - اصول میکروکامپیوترها - للکترو نیک قدرت و محرکه - ارتعاشات مکانیکی - طراحی مکانیزم
دروس اختیاری 13 واحد
مدار های الکتریکی 2 - اندازه گیری الکتریکی - مدار های واسطه - کنترل فازی - کنترل مدرن - شبکه های عصبی - سیستم های محرکه - یاتاقان و روغن کاری - علم مواد - آزمایشگاه ارتعاشات - طراحی ماشین با کامپیوتر.
●صنعت و رباتیک
امروزه کمتر کارخانه ای را می توان یافت که در آن از ربات استفادهنشود . بازو های رباتیکی که بدون استراحت قطعات و محصولات را از نقطه ایبه نقطه ی دیگر جا به جا می کنند . ربات های جوشکار ربات های رنگرز رباتهای بسته بند ربات های تراشکار ربات های چاپگر ربات های کنترل کیفیت رباتها سوراخکار ربات های کنترل دما ربات های هشدار دهنده ی نشت گاز ربات هایغربال سانتریفوژ های خودکار و ... همگی نمونه هایی از ربات ها در کارخانهها هستند .
کارخانه ها برای افزایش سرعت و کیفیت و دقت و هزینه ی پایین تر بهسمت رباتیکی کردن تمامی قسمت های کارخانه پیش می روند و در بعضی از قسمتها که برای انسان خطرناک است مانند جوشکاری و رنگ پاشی و سموم شیمیایی و.... ناچار به استفاده از ربات می شوند .
●زندگی امروز و رباتیک
اگر نگاهی به محیط زندگی خود بیاندازیم می بینیم ربات ها همه جا رافرا گرفته اند ام تا به حال به آن توجه نکرده ایم . آسانسور ها چراغ هلیراهنمایی رانندگی ماشین لباس شویی خودرو های شخصی رایانه ی رومیزی تابلوهای نوشتاری متحرک برف روب ها ربات های جراح و ... همگی ربات هستند . واگر دقیقتر ببینیم پدافند های موشکی هواپیما های بدون سرنشین ماهواره هامریخ نورد ها ربات نیز ربات می باشند .
●آینده ی رباتیک
ربات ها هر روز گسترده تر می شوند بزودی ربات های پرستار نظافت چی فوتبالیست آشپز مربی و ... به تولید انبوه می رسند قرار است تا سال 2050دانشمندان تیم فوتبال رباتیک بسازند که با انسان ها بازی کنند و آن ها راشکست دهند . یک روز فرا می رسد که در هر خانه ای یک ربات انسان نما و همه کاره وجود داشته باشد و در صنایع و کشاورزی و ... دیگر به انسان نیازنباشد و انسان در آن فقط تفریح و تولید علم کند .
●رباتیک و ایران
رباتیک در ایران نوپا می باشد و تمامی ربات های مورد نیاز وارداتی میباشد و شرکت های فعال در این زمینه فقط وارد کننده و تعمیر کننده می باشندو متاسفانه هنوز تولید کننده نداریم . هر ساله مسابقات رباتیک بسیاری درایران به منظور علاقه مند کردن دانجویان به کار در زمینه ی ربات برگذار میشود
●وضعیت ادامه تحصیل در مقاطع بالاتر
اسم رشته ی مهندسی رباتیک در مقطع کارشناسی ارشد مهندسی مکاترونیک میباشد و مسئولان دانشگاه قول داده اند به زودی رشته ی مهندسی رباتیک درکارشناسی ارشد را با چهار گرایش «کنترل ربات» و «بینایی ربات و پردازشتصویر» و «ساخت و تولید ربات» و «مکاترونیک ربات» ایجاد نمایند
●بازار کار
در ابتدا باید ذکر کنم که بازار شغلی این رشته در ایران اشباع نشده است و به امید خدا مهندسین این رشته ،اکثراً جذب کارخانه ها خواهند شد زیرا هزینه یک مهندس رباتیک ایرانی خیلی پایین تر و به صرفه تر از خارجی می باشد و یا استخدام چند مهندس مختلف نیز هزینه بر است و یا افراد توانا در بر طرف کردن نیازهای رباتیکی کارخانه ها نیز که خیلی خیلی کم هستنند ، دستمزد بالا دریافت کرده و شاید به اندازه یک فارغ التحصیل این رشته نیز مهارت کافی و مطالعه و توانایی نداشته باشند.
هم اکنون تعداد زیادی از کارخانه ها برای هوشمند کردن و اتوماسیون خط تولید و تعدادی نیز برای راه اندازی تعمیر و نگهداری از ربات نیازمندنیروی کار هستند. سازمان فضایی ، پژوهشکده ها ، سازمان انرژی اتمی ، شرکت نفت ، کارخانه های خودروسازی ، ارتش ، سپاه ، شرکت های وارد کننده ودانشگاه ها ، به دنبال استخدام مهندسین رباتیک می باشند.
●ارتباط رشته رباتیک با دیگر رشته ها
در حقیقت اگر یک مهندس رباتیک قصد نو آوری و ایجاد یک تکنولوژی را در سر بپروراند و برای مثال طرح یک ربات فوتبالسیت آدم واره را بریزد ملزوم به استفاده از دروسی که قبلا ً ،فراگرفته و یا تکمیل آنها میباشد به عبارتی باید در برنامه نویسی و تنظیم الگوریتم بهینه ،طراحی مدارهای الکتریکی و الکترونیکی مورد نیاز، طراحی مکانیزم عالی و ی نقص و کار امد در ایجاد تعادل پویا مهارت کافی داشته باشد.
به خصوص در زمینه طراحی کامیپوتری مدارها ، اجزاء و از همه مهمتر برنامه نویسی در سطح بالای قرار داشته باشد تا این نیازها را برطرف کند.
بر فرض برای طراحی یک ربات آی کاوشگر باید با روشهای عایق بندی آشنا باشد و یا در یک ربات پرنده با طراحی سیستم آئرودینامیکی تا حدودی آشنایی داشته باشدو یا در تولید و ساخت ربات جنگنده، آشنا به موارد مختلف و ویژگی های مختلف آنها مثل استحکام و سبک وزنی یا انعطاف و سختی و دیگر مورد این چنینی باشد.
البته مثل دیگر رشته های میان رشته ای ارتباط های زیادی میتوان با دیگر علوم و فنون پیدا کرد که موارد فوق مربوط به رباتیک بودند که به نظر من این ارتباطات در این رشته بیشتر از دیگر رشته هاست.
●دانشگاهها و موسسات دارای این رشته در خارج از ایران
Caltech
Carnegie-Mellon University
Cal Poly Pomona
Colorado School of Mines
Columbia University
Cornell University
Dartmouth College
Drexel University
Florida A&M University/FSU
Florida International University
Georgia Tech
Indiana University
Johns Hopkins University
Kansas State University
Long Beach City College
MIT
New Mexico Institute of Mining & Technology
Ohio State University
North Carolina State University
Northwestern Polytechnic University
Rice University
Stanford University
Tennessee State University
Texas A&M University
University of Arizona
UC Berkeley
UC San Diego
UC Santa Cruz
University of Cincinnati
University of Florida
University of Hawaii
University of Houston
University of Idaho
University of Maryland
University of Massachusetts, Amherst
University of Michigan, College of Engineering
University of Michigan, Ann Arbor
University of Minnesota
University of Nebraska, Lincoln
University of New Hampshire
University of New Mexico
University of Notre Dame
University of Oklahoma
University of Pennsylvania
University of Rochester
University of Southern California
University of Tennessee, Knoxville
University of Texas, Austin
University of Texas, Dallas
University of Washington, Bothell
University of Washington, Seattle
University of Wisconsin, Madison
University of Utah
U.S. Air Force Academy
Utah State University
Vanderbilt University
Virginia Tech
Wellesley University
The Harvard Robotics Laboratory
Canada
University of Alberta
Europe
University of Leoben, Institute of Automation, Austria
The Maersk Mc-Kinney Moller Institute for Production Technology, University
Institute of Computer Science, University of Freiburg, Germany
University of Kaiserslautern, Germany
University Bonn, Germany
Utrect University, The Netherlands
University of Maribor, Institute for Robotics, Slovenia
University of Zurich, Switzerland
Luleå University of Technology, Sweden
University of Edinburgh, Scotland
Computer science, Queen Mary, University of London, UK
Southhampton University Robot Wars Team, UK
University of Plymouth, Robot Football, UK
University of Kaiserslautern
Royal Institute of Technology, Stockholm, Sweden
University of Stuttgart, Germany
Ruhr-Universität Bochum, Germany
University of Tsukaba, Japan
Shahrood University of technology , Iran
University of New South Wales
Australia National University, Robotics Systems lab
University of Western Austrialia
>>چشم انداری از رباتیک

شهری را تصور کنید که رباتها در اکثر فعالیت های انسانی و بشری کمک رسان بشر شده اند.به یقین که نگاهی با کمی دورنگری و کمی بزرگ نمایی از آینده این رشته بسیار نگران کننده و شاید خطرناک باشد.تصور این که رباتی شما را در یک معمله بفریبد و یا رباتی که دارای احساس و اندیشه و جماعاتی رباتی که بر سر مسایل مورد نظر شان مثل کم توجهی به آنها شروع به شورش کنند و دیگر موارد که اکنون خنده دار و در باطن نگران کننده است.
البته مفید بودن ساخته دست بشر در درجه اول قرار میگیرد در راستای همین مطالب بد نیست نگاهی با تامل و جدی به فیلم "مرد 200 ساله" بیاندازید که به تصور شما کمک میکند.
>> انواع ربات ها
رباتهای کارتزین و گانتری
این رباتها دارای سه محور خطی میباشند که دو به دو برهم عمودند. به طور بدیهی فضای کاری این ربات یک مکعب مستطیل است. هرچیزی دارای نقاط قوت و ضعفت است که این ربات هم از این قاعده مستثنی نیست.
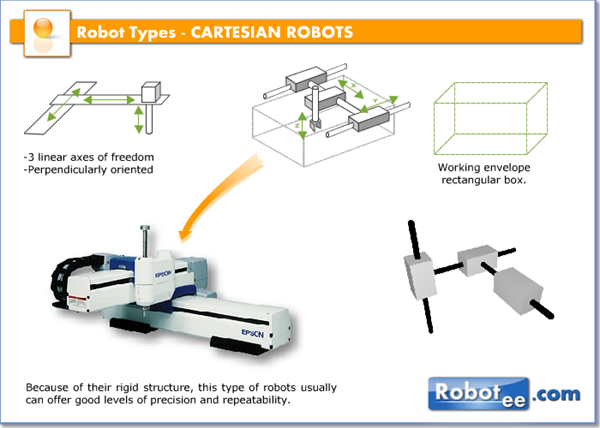
ربات های کارتزین
به خاطر ساختار صلب این گونه رباتها، دقت و تکرارپذیری در این ربات ها در سطح خوبی قرار دارد. ربات هنرمند ۶ محوره با یک ربات ۳ محوره ی کارتزین قابل مقایسه نیست. بنابراین ربات های کارتزین از نظر تکرارپذیری بهتر هستند چراکه درجات کمتر منجر به مفاصل کمتر و مفاصل کمتر منجر به دقت بهتر می شود.
از نظر تئوری هم پروگرام کردن این ربات ها راحت تر است، اگر چه که امروزه این فرآیند کار سختی نیست؛ چراکه شرکت های سازنده تمامی این قسمت را در قالب کنترلری که همراه ربات هست، ارائه می کنند و نیازی ب وارد شدن به مبحث برنامه نویسی نیست.
همانطور که فهمیدید ربات های کارتزین از دیگر ربات ها ساده ترند تا آن حد که حتی خودتان هم می توانید یک ربات کارتزین بسازید. شرکت های زیادی چون Festo و Epson و Bosch وجود دارند که هم ماژول های برقی و هم ماژول های نیوماتیکی را تامین می کنند. برای ساخت شما می توانید تجهیزات مختلف را خریداری و سپس سرهم نمایید. اما اینجاست که بحث برنامه نویسی مطرح می شود. برنامه نویسی این ربات ها همچنان به صورت دستی صورت می پذیرد.
یک ربات کارتزین به نسبت دیگر ربات ها با کار مشابه، به علت سادگی قیمت کمتری دارد.
همانطور که متصور است، فضای کاری این ربات ها خیلی ایده آل نیست. همچنین توانایی این ربات ها برای انجام حرکات دورانی کم است. البته می توان به انتهای محور افق یک محور دورانی برای چرخش ابزار اضافه نمود ولی انجام بعضی از کارها نظیر جوشکاری خیلی از این ربات ها مورد انتظار نیست. ضمنا فضایی که این ربات ها اشغال می کند نسبت به دیگر ربات ها برای کار مشابه کمتر است.
با بررسی موارد فوق به این نتیجه می رسیم که: ربات های کارتزین عموما برای کارهای جابجایی (peak and place) ارزان تر هستند. همچنین برای کارهایی که به دوران زیاد ابزار نیاز ندارند و یا اینکه دوران در آنها قابل حذف است مناسب هستند. مثل : چسب کاری، لحیم کاری، خیاطی، جابجایی (Peak and Pleace) و …
ربات های گانتری (Gantry):
در بسیاری از موارد دیده می شود مه ربات های گانتری جدا از ربات های کارتزین توضیح داده نمی شوند که به نظر ما این کار خطاست. ربات های گانتری به علت ساختار و کاربردهای متفاوتشان باید جدا توضیح داده شوند.
همانطور که می بینید حرکت در محور x روی دو تیر که در راستای محور x هستند، انجام می پذیرد. کالسکه ای که روی محور y قرار دارد نیز درراستای y حرکت می نماید که ریل آن بین تیرهای محور x قرار دارد. ابزار هم در راستای z که روی کالسکه بسته شده، حرکت می کند.
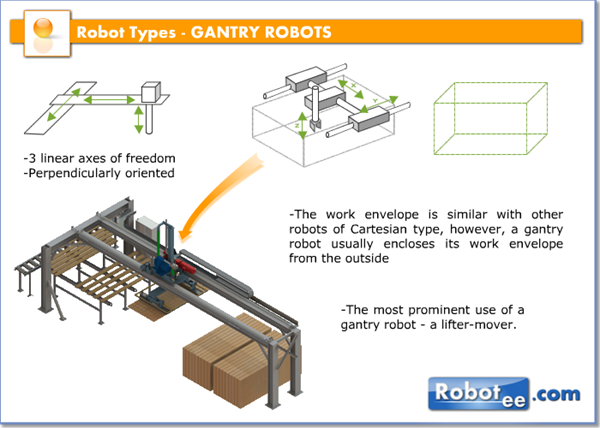
ربات های گانتری
فضای کاری این ربات ها شبیه ربات های کارتزین است اگر چه که معمولاً در ربات های گانتری فضای کار محصور در ربات است. خوب است به این واقعیت اشاره شود که تنها قسمتی از ربات که با فضای کاری درگیر است، ابزار و محور z است.
همان طور که می بینید، ربات رو چهار ستون یا پایه محکم شده. اگر پایه ها به قدر کافی محکم باشند، ربات می تواند بارهای سنگینی را جابجا کند. بلندکردن و حرکت (Lifter – Mover) بیشتری فراوانی را در بین کاربردهای این ربات دارد. اما علاوه بر این از این ربات ها در کارهایی چون جابجایی (Peak and Pleace)، بسته بندی، سرهم کردن (Assembly) و … استفاده می شود.
یکی از کاربردهای جالب این ربات این است که می توان از آن به عنوان بستری برای دیگر ربات ها استفاده نمود. مثلاً یک ربات ۶ درجه آزادی را می توان به صورت وارونه به عنوان محور z این ربات، روی آن نصب نمود که این کار ابتکاری و جالب باعث بیشتر شدن حوضه های کاری این ربات می شود.
منبع اصلی: ترجمه شده از سایت Robotee.com (با اندکی تغییرات)
منبع: تارنمای رباتیکال (Robotical.ir)
فیلم نمونه
در این قسمت یک فیلم، به عنوان نمونه برای آشنایی با رباتهای «کارتزین-گانتری» انتخاب شده است.
رباتهای سری (صفحهای و فضایی)
به طور کلی ربات های سری به دو دسته ی « ربات های سری صفحه ای – Planar Serial Robot » و « ربات های سری فضایی – Spatial Serial Robot » تقسیم می شوند. در ادامه با چهار نوع عمومی این ربات های آشنا می شوید.
ربات های ماهر – Articulated Robots
ربات ماهر یا ربات بازو یا ربات منیپولاتور، رباتی با مفاصل دورانی است (شبیه ربات های پادار یا ربات های صنعتی). ربات های ماهر در مدل های مختلفی وجود دارد، از رباتی با ۲ مفصل گرفته تا ۱۰ مفصل متقاطع. این گونه ربات ها می توانند با محرکه های مختلفی از جمله موتورهای الکتریکی حرکت کنند.
نوع خاصی از این ربات ها مثلا بازوربات ها می توانند ماهر یا غیرماهر( articulated or non-articulated) باشند.

ربات های ماهر – Articulated Robots
ربات اسکارا – Scara Robot

ربات اسکارا – Scara Robot
لغت اسکارا خلاصهی عبارت Selective Compliant Assembly Robot Arm یا Selective Compliant Articulated Robot Arm است.
در سال ۱۹۸۱ Sankyo Seiki، Pentel و NEC مطلب کاملا جدیدی را در زمینه ربات های مونتاژکار (Assembly Robot) ارائه نمودند. این ربات با راهنمایی های Hiroshi Makino که یکی از اساتید دانشگاه Yamanashi بود پیشرفت کرد. این ربات را SCARA یا Selective Compliance Assembly Robot Arm نامیدند. بازوهای این ربات در راستای Z صلب بوده ولی راستای XY اجازه ی انطباق با سوراخ ها را می دهد.
به موجب موازی بودن محورهای اسکارا، بازو در راستای X-Y کمی انعطاف پذیر است، ولی در راستای Z صلب میباشد. به همین علت از عبارت Selective Compliant یا سازگاری گزینشی، استفاده شده. این خصلت برای بسیاری از عملیات مونتاژکاری سودمند است. مثلا یک پین گرد داخل سوراخ دایره.
خصلت دیگر ربات های اسکارا اتصال دو لینک در بازو، شبیه بازوی ما انسانها، است. استفاده از لغت Articulated به همین علت است. این قابلیت امکان دسترسی به مناطق محصور شده و سپس داخل شدن یا خارج شدن از آنها را، افزایش می دهد. این خصوصیت برای جابجایی قطعات از یک سلول به سلول دیگر یا فرآیند پر و خالی کردنی که محصور باشد، سودمند است.
اسکارا نسبت به رباتهای کارتزین مشابه، سریعتر و تمیزتر است. داشتن یک پایه و نصب آسان و بدون مانع و نیاز به فضای نصب کم از ویژگیهای این ربات هستند. از سوی دیگر اسکارا قیمت بیشتری نسبت به سیستمهای کارتزین مشابه دارد و همچنین نرم افزار کنترل این ربات ها نیازمند سینماتیک معکوس برای حرکت درونیابی خطی است. این نرم افزار به طور مخصوص با خود اسکارا ارائه می شود.
ربات استوانه ای – Cylindrical Robot
ربات های استوانه ای امروزه نادر هستند. با این وجود فضای کاری آنها باعث شده که این ربات ها مفید واقع شوند. همچنین همیشه از این ربات ها در لابلای مباحث ربات های ایستاده (stationary) یاد می شود، اما ما سعی داریم شما را با این عنوان آشنا کنیم.

ربات استوانه ای – Cylindrical Robot
شما می توانید در این تصویر ساختار پایه و اصلی این گونه از ربات ها را مشاهده نمایید. همانطور که مشاهده می کنید، این ربات دارای سه محورحرکتی می باشد که دوتای آنها خطی و دیگری دورانی (استوانه ای) است. معمولا این دسته از ربات ها در راستای محور های Z و Y می چرخند و حول محور Z دوران می کنند. همانطور که فهمیدین، این گونه رباتها، اساساً، به شکل سیستم مختصات استوانه ای هستند، لذا دارای فضای کاری استوانه ای هستند.
در بیشتر کاربردها، این ربات ها در جاهایی استفاده می شوند که فضای کاری استوانه ای باشد و در آن ابزار به شکل افقی و دارای قابلیت دوران قرار گیرد. مثلاً جابجایی یا سرهم کردن و یا نقطه جوش.
ربات کروی – Spherical Robot
رباتهای کروی که گاهی به آنها رباتهای قطبی نیز گفته میشود، ربات ایستادهای هستند که دارای فضای کاری کروی یا شِبهکروی میباشند؛ که میتوانند در سیستم مختصات قطبی قراربگیرند.

ربات کروی – Spherical Robot
این رباتها به نسبت رباتهای کارتزین یا استوانهای پیچیدهتر هستند، درحالی که فرایندکنترلی نسبت به رباتهای ماهر پیچیدگی کمتری دارد. این موضوع باعث شدهاست که از این ربات برای تمرینهای پایهی سینماتیک استفاده شود.
خوب است بدانید که این رباتها یک نقطهی برجسته در تاریخ خود دارند و آن اینکه، میتوان این ربات را به عنوان یکی از اولین رباتهای این دسته از رباتها برشمرد. همچنان صنایع پیشرفتهی رباتهای بازو با فضای کاریای شبیه رباتهای کروی، گاهی از این رباتها و یا رباتهایی با فضای کاری شبیه کره استفاده میکنند.
این رباتها دارای دو محور دورانی و یک محور خطی میباشند. به همین علت است که فضای کاری ربات کروی میشود. البته این فضای کاری یک کره نیست ولی میتوان نقاط قابل دسترسی آن را در دستگاه مختصات قطبی، جاروب نمود.
همانطور که متوجه شدید ممکن است این ربات بیش از سه مفصل داشته باشد؛ اگر چه که همین سه تا به عنوان مبنا برای این فضای کاری است. مفاصل بیشتر به راحتی اضافه میشوند ولی تغییرات خاصی در فضای قابل دسترسی ربات ایجاد نمیکنند. مثلاً اگر گریپر این ربات بچرخد، ربات به ربات چهار درجه آزادی تبدیل شده است ولی فضای کاری آن در کل تغییری نکرده.
رباتی با ساختار R-R-R در تصویر دیدهمیشود. همانطور که فهمیدید رباتهای اینچنینی فضای کاری شبه دایرهای دارند. بیشتر رباتها در صنایع پیشرفته از زیرمجموعههای این گونه از رباتها هستند.
منبع اصلی: ترجمه شده از سایت Robotee.com (با اندکی تغییرات)
منبع: تارنمای رباتیکال (Robotical.ir)
فیلم نمونه
در این قسمت چند فیلم به عنوان نمونه برای آشنایی با رباتهای «سری (صفحهای و فضایی)» انتخاب شده است.
رباتهای موازی (صفحهای و فضایی)
ربات های موازی (Parallel Robot) به دو دستهی کلی تقسیم میشوند. ربات های موازی صفحهای (Planar Parallel Robot) و ربات های موازی فضایی (Spatial Parallel Robot)

لغت موازی
شاید بتوان گفت، لغت موازی، در نامگذاری این ربات ها ربط زیادی به شکل فیزیکی و ساختار مکانیکی آنها ندارد. چون اگر به شکل ظاهری آنها ربط میداشت، باید در تمامی رباتهایی که با نام موازی میشناسیم، اثری از موازی بودن دو عضو آن ربات میدیدیم؛ درحالی که اینطوری نیست. جریان ازین قرار است که در گذشته مکانیزم رایج، همان مکانیزم سری بوده است. ولی بعد که این مکانیزمها (که الان آن ها را با نام موازی میشناسیم) حضور پررنگ پیدا کردند، نام آنها را چیزی در مقابل نام سری، انتخاب کردند. لذا عنوان موازی، بیش از اینکه جنبهی توصیف ظاهر این ربات ها را داشته باشد، عنوانی در مقابل سری، است.
درجات آزادی (Degrees Of Freedom:DOF) ربات های موازی
ربات های سری از نظر درجهی آزادی، انواع مختلفی دارند. معمولاً این رباتها از دو تا شش درجه آزادی دارند.

اجزاء ربات های موازی
مکانیزم ربات های موازی معمولاً از چهار جزء اصلی تشکیل شده است.

۱- بخش ثابت (Fixed Platform)
منظور از بخش ثابت، آن قسمتی از ربات است که به جایی وصل میشود و حرکت ندارد.
۲- پاها (Legs)
پاهای ربات های موازی انواع خیلی متوعی دارند که با توجه به درجات آزادی و انتظار ما از ربات، میتوان مورد مناسب را انتخاب نمود.

۳- بخش متحرک (Movable Platform)
بخش متحرک، درواقع همان مجری نهایی است. اگر قصد نصب چنگه (Gripper) روی این رباتها داشته باشیم، باید آن را روی این قسمت نصب نماییم.
به طور بدیهی هر چنگکی، خودش به یک موتور نیاز دارد. در ربات های موازی معمولاً خود موتور را برای کاهش وزن، روی بخش متحرک قرار نمیدهند بلکه، آن را روی قسمت ثابت نصب میکنند و با یک رابط (Link) نیرو را به مجری نهایی یا همان بخش متحرک منتقل میکنند.
۴- عملگرها (Actuators)
عملگرها انواع مختلفی دارند که مشهورترین آنها، موتورها هستند. در ربات های موازی هرجایی که نیاز به حرکت داشتهباشیم، از عملگر استفاده میکنیم. عملگرهای دورانی (مثلاً موتورها) و عملگرهای خطی (مثلاً جکهای برقی، بادی یا روغنی) دو نوع رایج، برای ایجاد حرکت هستند. با توجه به مکانیزم ربات میتوان از عملگر مناسب استفاده کرد.
ویژگیهای رباتهای موازی
سرعت و دقت، مهمترین برتریهای ربات های موازی در مقابل ربات های سری هستند. در رباتهای سری، خطای مجری نهایی، مجموع خطاهای قسمتهای قبل آن است. ولی در ربات های موازی، خطای مجری نهایی، متوسط خطاهای بخشهای قبلی میباشد.
ویژگی دیگر این رباتها این است که تمامی عملگرهای، روی بخش ثابت قرار دارند، درحالی که در رباتهای سری، معمولاً هر عملگر روی بازوی مرتبط با خودش قرار دارد.
این رباتها، در مقایسه با رباتهای سری، از صلب بودن بیشتری برخوردارند. حلقهی سینماتیکی بستهی این رباتها، باعث میشود که حرکتهای بسیار کوچک ناخواسته به حداقل خود برسند. (مقالهی Parallel Robots، تارنمای Robotee.com)
کاربرد رباتهای موازی
رباتهای موازی، مانند دیگر رباتهای موجود در بازار، از کاربرد فراوانی در حوزههای مختلف برخوردارند. مثلاً صنایع بستهبندی، شبیهسازهای پرواز، قسمتهای مختلف خطوط تولید و … .
[تصاویر شماتیک فوق از کتاب Parallel Kinematics چاپ انتشارات اشپرینگر استخراج شده اند.]
فیلم نمونه
در این قسمت یک یا چند فیلم، به عنوان نمونه برای آشنایی با رباتهای «موازی (صفحهای و فضایی)» انتخاب شده است.
ربات های چرخ دار و شنی دار
ربات های چرخ دار ربات هایی هستند که با استفاده از چرخ های موتوردار روی زمین حرکت می کنند. این نوع طراحی از پا داشتن و راه رفتن راحت تر است، ضمنا استفاده از چرخ، طراحی، ساخت و برنامه ریزی این ربات ها را برای زمین های مسطح – ونه زمین های ناهموار – راحت تر کرده است. این ربات ها نسبت به دیگر انواع ربات بهتر قابل کنترل هستند. یکی از نقطه ضعف های این ربات ها هم این است که حرکت آنها در شرایطی که مانع وجود دارد، مثل زمین های ناهموار سنگی، شیب های تند، جاهایی ک اصطکاک کمی دارند؛ نمی توانند حرکت کنند.
ربات های چرخ دار به علت اینکه دارای فرمان دیفرانسیلی (differential steering) و درنتیجه ارزان تر و ساده تر هستند، یکی ربات های رایج در بازار مصرف می باشند. این ربات ها می توانند هرتعدادی چرخ داشته باشند ولی برای تعادل دینامیکی و استاتیکی، سه چرخ کافی است. برای تعادل بهتر می توان چرخ هایی اضافه نمود ولی مکانیزم های افزوده شده باید جوری باشند که حتی موقعی که ربات روی سطح صاف نیست، تمام چرخ ها روی زمین باشند.
ربات های تک چرخ
نگه داشتن تعادل در ربات هایی که یک چرخ دارند به علت اینکه فقط یک نقطه ی تماس با زمین دارند، کار سختی است.
ربات های متحرکی که چند چرخ دارند و از نظر استاتیکی پایدارند و قد آنها برای ارتباط با افراد بلند است، باید مرکز ثقل پایین، بدنه ی پهن و شتاب پایین داشته باشند. این شرایط منجر به بروز محدودیت هایی در کارایی آنها شده است.

لذا، ما یک نوع وارون این ربات های متحرک را بررسی نمودیم که، طول، عرض و وزن شخص به گونهای باشند که مرکز ثقل بالایی داشته باشند تا بتوانند روی یک چرک کروی تعادل خود را حفظ کنند. برخلاف آن نوع رباتهایی که دو چرخ دارند که برای حرکت در یک مسیر خاص باید اول مقداری دوران کنند و بعد به جلو بروند، این ربات هایی که یک چرخ دارند، می توانند به طور مستقیم در هر جهتی حرکت نمایند. شکل کلی طراحی این ربات ها را می توان شبیه موس (موشواره) هایی دانست که در آنها از یک گوی و دو انکودر که با این گوی تماس دارند و کار تشخیص جهت دوران این گوی را انجام می دهند، دانست. با این تفاوت که در این رباتها همان کار به صورت وارون اتفاق افتاده است. موتورهایی که به گوی متصل هستند و سیستم کنترلی باعث پدیدار شدن تعادل دینامیکی، حفظ موقعیت و حرکت از نقطه ای به نقطه ای دیگر می شوند.
یک مشکل مهم و متداول که بسیار در این رباتها دیده شده این است که در حالتی که یک ربات متحرک چرخ دار از نظر استاتیکی پایدار است، این پایداری آن به راحتی تبدیل به یک ناپایداری دینامیکی می شود؛ اگر:
- مرکز ثقل بسیار بلند باشد
- یا شتاب تند شونده یا کند شونده بسیار سریع اتفاق بیفتد
- یا ربات در سراشیبی تند قرار بگیرد
از سویی ارتفاع ربات باید آنچنان باشد که بتواند با انسانی که روی آن قرار میگیرد همخوانی و تعامل داشته باشد و سوی دیگر باید آنقدر لاغر باشد که بتواند به راحتی و بدون برخود با افراد یا اشیاء در میان مردم حرکت کند.
ربات های دو چرخ
مشابه ربات های تک چرخ، متعادل نگاه داشتن ربات های دوچرخ نیز نسبت به دیگر انواع ربات مشکل است، چراکه باید در جهت رو به جلو به حرکت خود ادامه دهد. مرکز جرم این ربات ها باید پاین تر از حور چرخ ها باشد. معمولاً برای این کار باتری های ربات را در این قسمت جاسازی می کنند.

چرخ های این ربات ها ممکن است با یکدیگر موازی باشند که در این حالت به آنها Dicycle گفته می شود؛ یا اینکه یکی در جلوی دیگری به صورت متوالی قرار بگیرد.
ربات های دوچرخ برای سرپا ماندن باید در در حال حرکت باشند، برای این کار هم باید در یک مسیر حرکت کنند. برای متعادل ماندن، بدنه ی این ربات باید زیر مرکز جرمش قرار بگیرد. برای چنین رباتی که یک چرخ در سمت راست و یک چرخ در سمت چپ دارد، حداقل دو حسگر (Sensor) لازم است. یک حسگر شیب، برای تشخیص زاویه ی شیب مسیر و انکودرهایی برای چرخ ها برای تبیین جابجایی ربات.
ربات های سه چرخ
ربات های سه چرخ را می توان به دو دسته ی کلی تقسیم نمود:
- ربات هایی که دوچرخ اصلی برای ایجاد حرکت و انتقال قدرت، و یک چرخ هرزگرد برای حفظ تعادل دارند.
- ربات هایی که چرخ سوم آنها هرزگرد نبوده و آن نیز در جهت گیری و حرکت ربات موثر است. (شبیه خودرو)
در مورد اول، هریک از چرخ های اصلی به طور مجزا حرکت می کنند و اگر هردو همجهت بچرخند، ربات به طور مستقیم حرکت می کند ولی اگر خلاف جهت هم بچرخند ربات نیز می پیچد. نقطه ی دوران ربات در حالتی که چرخ ها در جهات مختلف دوران می کنند، با توجه به تفاوت سرعت دوران آنها، قابل تغییر است.

مرکز ثقل در این ربات ها درون یک مثلث قرار دارد که گوشه های این مثلث چرخ های ربات هستند. اگر جرم بیش از حد سنگینی روی چرخ هرزگرد قرار بگیرد، ربات واژگون خواهد شد.
ربات های چهار چرخ
این ربات ها نیز حالات مختلفی دارند:
- ربات هایی که دو چرخ آنها به موتور وصل است و دو چرخ هرزگرد دارند.
- ربات هایی که شبیه تانک، چرخ های آنها دو به دو به هم متصل هستند.
- ربات هایی که شبیه خودرو، دارای فرمان هستند.

حالت اول، شبیه ربات های سه چرخ است که یک چرخ هرزگرد داشتند، با این تفاوت که ربات های چهار چرخ به علت وجود دو چرخ هرزگرد، تعادل ربات بیشتر است. علت این تعادل بیشتر هم این است که نقطه ی ثقل درون یک مستطیل قرار دارد که گوشه های آن چرخ های ربات هستند؛ که این باعث ایجاد فضای مفید بیشتری می شود. یک حالتی که پیشنهاد می شود این است که تلاش شود نقطه ی ثقل ربات در وسط مستطیل قرار بگیرد تا موقع دور زدن در پیچ های تند و همچنین در سطوح ناهموار تعادل ربات بیشتر حفظ شود.
در حالت دوم، ربات از دو جفت چرخ متصل به موتور استفاده می کند. هرجفت –که با یک خط به هم متصل هستند- در جهت یکسان دوران می کنند. نکته ی مهم در این ربات ها این است که چرخ ها در هرجفت باید با سرعت یکسان بچرخند. اگر اینطور نشود، آنی که سرعتش کمتر است، هرز و ناکارآمد خواهد بود. اگر ۲ جفت، با سرعت یکسان نچرخند، ربات به مسیر مستقیم نخواهد رفت. طراحی خوب، ترکیب با مکانیزمی شبیه فرمان خودرو است.
در حالت سوم، ربات شبیه یک خودرو می چرخد. وقتی که ربات شما با یک موتور احتراقی کار می کند، این سیستم نسبت به موارد فوق یک مزیت دارد و آن هم اینکه فقط یک موتور برای حرکت لازم است. (البته یک سرو موتور هم برای فرمان) موارد قبلی، دوموتور نیاز داشتند و یا اینکه یک موتور با یک جعبه دنده ی پیشرفته تا بتواند دو خروجی مستقل از نظر سرعت و جهت دوران ایجاد کند.
ربات های چند چرخه
وقتی که چرخ های ربات زیاد شود، به همان نسبت طراحی آن هم پیچیده می شود چرا که برای حرکت مستقیم باید تمامی چرخ ها با سرعت یکسان بچرخند. تفوت سرعت در ربات هایی با فرمان دیفرانسیلی، باعث می شود ربات از مسیر مستقیم منحرف شود. تفاوت سرعت در بین چرخ های یک طرف ربات باعث می شود چرخی که سرعتش کمتر است ناکارآمد شود.

گاهی چرخ های هرزگردی اضافه می شود که حرکت ربات را با دقت بیشتری اندازهگیری می کنند. افزودن این چرخ ها روی برخی که به موتور وصل است، مانع ایجاد لغزش و حرکات دیگر می شود که این موجب بروز خطا است. مریخ پیماها ربات های (Sojourner, Spirit, Opportunity) شش چرخ هستند که بعد از پرتاپ روی سطح مریخ حرکت کردند. این ربات ها برای بکار برده شده اند. از این ربات ها برای آزمایش خاک، مشاهده ی سطح مریخ و دیدن چیزهای جالب در آنجا استفاده می شود. سیستم تعلیق این ربات ها به گونه ای است که همزمان شش چرخ آنها با سطح در تماس است و ربات می تواند روی سطوح شیب دار یا شنی، حرکت کند.
ربات های شنی دار
وسیله ی نقلیه ی شنی دار (یا زنجیر دار) به وسیله ای گفته می شود که بجای چرخ از یک شنیِ یک تکه استفاده می کند.
این وسایل شامل ماشین های عمرانی و ساختمان سازی، خودروهای زرهی نظامی و وسایل نقلیه ی بی سرنشین می شود.
مزیت اصلی این مکانیزم نسبت به چرخ، این است که سطح تماس آن با زمین بیشتر است. لذا نسبت نیرویی که به واحد سطح وارد می شود، در این سیستم کمتر است. بنابراین می توان از این مکانیزم برای سطوح نرم و سطوحی با انعطاف کم مثل گِل، یخ و برف استفاده نمود. اصلی ترین عیوب این سیستم عبارت است از اینکه نسبت به چرخ، بسیار پیچیده تر است و از نظر مشکلاتی چون دَر رفتن یا چسبیدن بسیار مستعد است.

شنی های یک تکه، که به آنها شنی تانک یا کاترپیلار هم گفته می شود، سیستم هایی هستند که در آنها نیروی محرکه با آج های زیاد و متوالی و به هم چسبیده که با دو چرخ حرکت می کنند، منجر به جابجایی وسیله ی نقلیه می شود. معمولاً جنس این آج ها برای وسایل نظامی فولاد، و برای مواردی مثل وسایل کشاورزی یا ساختمانی ترکیب فولاد و لاستیک است. سطح زیاد این شنی ها در مقایسه با چرخ های لاستیکی یا فولادی، باعث شده است جرم وسیله ی نقلیه بهتر روی زمین توزیع شود. لذا احتمال گیرکردن یا غرق شدن در سطوح نرم کمتر شده است.
آج های برجسته ی فلزی مخصوصاً در مقایسه با چرخ های لاستیکی، هم یک پوشش خوب است، و هم یک چیز مقاوم در برابر خرابی تلقی می شود. این آج های زمخت اصطکاک خوبی را برای عبور از سطوح نرم ایجاد می کنند ولی در عین حال می توانند روی برخی سطوح مثل سطوح آسفالته، خرابی هایی را ایجاد نمایند. به برای رفع این مشکل می توان از ترکیب لاستیک و فلز برای این آج ها استفاده نمود.
این سیستم شنی، از سال ۱۷۷۰ تا امروز در حال استفاده است. که به عنوان مثال می توان به مواردی چون بولدوزرها، دستگاه های خاک برداری، تانک ها و تراکتورهای اشاره نمود. البته می توان در هر وسیله ای که از استفاده از این مکانیزم سود می برند، و نیاز به فشار کمِ وارد شونده به سطح دارند این سیستم را مشاهده نمود.
منبع اصلی: ترجمه با کمی تغییرات از Robotpark.com
منبع: iroref.ir
ربات های گروهی
رباتیک گروهی ( Swarm Robotics ) حوزه ی جدیدی در مباحث مربوط به سیستم های رباتیکی چندگانه است که شامل تعداد زیادی ربات فیزیکی و سخت افزاری، ساده است. رفتارجمعی مورد انتظار ما از این ربات ها بر اساس فعل و انفعالات بین ربات ها با یکدیگر و بین ربات ها با محیط پیرامونشان، شکل می گیرد. این حوزه، در مباحث هوش مصنوعی ازدحامی ( Artificial Swarm Intelligence ) ، آنجایی که به مطالعات بیولوژیکی حشره ها، مورچه ها و مواردی طبیعی دیگر می پردازند، بروز و ظهور پیدا کرد.

تحقیق در حوزه ی ربات های گروهی شامل طراحی ربات ها، بدنه ی فیزیکی آنها و کنترل کردن رفتار آنها می باشد. درست است که این حوزه از طبیعت الهام گرفته است ولی محدود به مشاهدات رفتاری حشرات گروهی که به آن هوش ازدحامی می گویند، نمی شود. قوانین نسبتاً ساده، می توانند مجموعه ی بزرگی از رفتارهای پیچیده ی گروهی یا ازدحامی را بسازند. یک جزء کلیدی، ارتباط بین اعضای یک گروه است که منجر به ساخت یک سیستم بازخورد ثابت (system of constant feedback ) می شود است. یک رفتار ازدحامی شامل تغییرات مداوم افراد مستقلِ گروه که با دیگران همکاری دارند، می باشد؛ به شکلی که در نهایت یک رفتار کلی دسته جمعی دیده شود.
برخلاف حالت کلی سیستم های رباتیکی توزیع یافته (distributed robotic )، رباتیک گروهی بر روی تعداد زیاد ربات ها و افزایش مقیاس پذیری آنها، مثلاً با استفاده از ارتباطات محلی (local communication )، تمرکز دارد. این ارتباطات محلی را می توانند با سیستم های ارتباط بیسیم نظیر فرکانس های رادیویی یا مادون قرمز اجرایی شوند.
اگرچه که روش های مختلفی برای ردیابی ( Tracking ) وجود دارد ولی ردیابی ویدئویی ( Video tracking ) یک ابزار ضروری برای مطالعه ی سیستماتیک رفتارهای گروهی است. اخیراً آزمایشگاه رباتیک بریستول ( Bristol Robotics Laboratory ) یک سیستم ردیابی آلتراسونیک برای تحقیقات در این حوزه ایجاد کرده است. بیشتر تحقیقات نیازمند پیدا کردن روشی برای طراحی و تخمینِ قابل اعتمادِ رفتارهای گروهی، وقتی که فقط مشخصه های تک تک اعضا داده شده است، هستند.
گروهی (یا ازدحامی) به چه معناست؟
با افزایش روزافزون کاربرد ربات ها، ربات های چندگانه ای که همه با هم، روی یک وظیفه مشخص، کار می کنند، نیز رایج شده اند. بیشتر کاربردهای مفید زیاد ربات ها که به طور خاص برای این کار مناسبند، در حوزه ی گروهی ( Swarm ) می گنجد. گروه های متشکل از ربات ها، می توانند این وظایف را به شکل موثرتر و اساساً متفاوت با ربات هایی که به طور مستقل کار می کنند، انجام دهند. با این حال برنامه دادن و هماهنگی ربات های گروهی کار سختی است.
کاربرد ربات های گروهی
کاربردهای زیادی برای ربات های گروهی وجود دارد. ربات های جاروبرقی گروهی برای تمیز کردن محیطی که نقشه آن به آنها داده شده، ربات های مریخ نورد، برای پخش شدن در محیط ضمن نگاه داشتن ارتباطاتشان با یکدیگر. مثال دیگر سه شکلِ ربات هایی هستند که برای امداد رسانی در زلزله ها استفاده می شوند. یکی اینکه هزازران ربات با اندازه ی سوسک، وارد خرابه ها می شوند و محل مصدومین را مشخص می کنند؛ دیگر اینکه ده ها ربات با اندازه ی موش، به صحنه نزدیک می شوند و همه با هم به برداشتن آوار کمک می کنند؛ و آخری هم اینکه چندین ربات با اندازه ی دایناسور که وزنه برداران قویی هستند، برنامه ی امداد را انجام دهند.
در تمام این موارد، هر یک ربات باید به طور مستقل و فقط با ارتباط ربات های مجاور کار کند. کنترل از یک محل مرکزی خیلی پرهزینه ( درحالی که ربات های جاروبرقی خیلی باید ارزان باشند )، دور و زمان بر ( ۱۵ دقیقه طول می کشد که پیام به مرییخ برسد )، یا ناممکن است ( سیگنال هایی رادیویی که برا کنترل ربات استفاده می شوند، نمی توانند وارد خرابه های بعد از زلزله شوند ). لذا یک سیستم کنترلی توسعه یافته به ربات ها این اجازه را می دهد که با ربات های مجاور ارتباط برقرار کنند و برای به انجام رساندن یک ماموریت با یکدیگر همکاری نمایند.
آینده ربات های گروهی
ربات ها یکی از بخش های مهم آینده خواهند بود. یک ربات به تنهایی مفید است و گروهی از ربات ها، در درجه ی بعدی قرار دارند و ظرفیت عظیمی برای مفید واقع شدن در آنها وجود دارد. کلیدی که برای باز کردن قفل استفاده از این ظرفیت لازم است، طراحی نرم افزار برای اعمال روی گروه های بزرگی از ربات ها، می باشد.
[با استفاده از تارنمای Robotee.com]
فیلم نمونه
در این قسمت یک یا چند فیلم، به عنوان نمونه برای آشنایی با رباتهای «گروهی» انتخاب شده است.
آموزش مقدمات رباتیک در زمینه:
۱) مکانیک :
بر روی کلمه دانلود کلیک کنید. سپس در صفحه ی باز شده ابتدا پسورد را وارد کنید سپس دکمه ی دریافت فایل را فشار دهید.
نوع فایل:pdf حجم:1.7Mb تعداد صفحات:16 پسورد:(solid-mechanics.blogsky.com)
۲) برق :
نوع فایل:pdf حجم:768kb تعداد صفحات:12 پسورد:(solid-mechanics.blogsky.com)
>> معرفی کتاب خودآموز روباتیک-اصول اولیه و پروژه های کاربردی ساخت روبات
نام کتاب: خودآموز کامل روباتیک، اصول اولیه و پروژه های کاربردی ساخت ربات
مولفان : مهندس علیرضا محمدی و مهندس علیرضا احمدیبزرگ
ناشر: نشر آفرنگ
تعداد صفحات: ۳۲۰
شابک :۰-۱۴-۵۰۶۰-۶۰۰-۹۷۸
رده بندی کنگره :۹خ۳م/TJ۲۱۱
شماره کتابشناسی ملی : ۱۶۹۴۶۰۴
تاریخ انتشار : ۱۳۸۸
توضیحاتی مختصر در مورد کتاب : این کتاب که حاصل سالها تجربه نویسندگان آن در زمینه ساخت انواع روباتها، شرکت در مسابقات روباتیک مختلف و تدریس در دورههای آموزشی میباشد، شامل مباحثی کاربردی درباره روباتیک است که تمام اجزای یک روبات از جمله مکانیک، الکترونیک، کنترلکنندهها، موتورهای الکتریکی و حسگرها را بررسی میکنند. کنترلکننده مورد استفاده در پروژههای کتاب، میکروکنترلر AVR میباشد که نحوه برنامهنویسی آن توسط دو کامپایلر CodeVisionAVR و BASCOM-AVR توضیح داده شده است. همچنین نحوه ساخت یک روبات امدادگر جونیور برای شرکت در مسابقات روبوکاپ و چگونگی شرکت در مسابقات مختلف روباتیک شرح داده شدهاند. هر فصل از این کتاب، شامل تمرینها و پروژههای کاربردی متعدد است که برای معرفی هرچه بهتر مفاهیم المانهای الکترونیکی و مکانیکی ارائه شدهاند. مطالب و پروژههای ارائهشده، از سطح مبتدی تا سطح پیشرفته توضیخ داده شدهاند و به همین علت طیف وسیعی از خوانندگان، از دانشآموزان تا دانشجویان، میتوانند از آن بهره ببرند.
سرفصل های این کتاب عبارتند از:
فصل اول : آشنایی با روباتیک
روبات چیست ؟
تاریخچه روبات
اجزای یک روبات
معرفی برخی از روبات های انسان نما
فصل دوم : مکانیک روبات ها
استاتیک روبات ها
دینامیک روبات ها
بازوی رباتیک
و ...
فصل سوم : الکترونیک ربات ها
ولتاژ جریان
مقاومت
سیگنالهای الکتریکی
بوردهای الکترونیکی
وسایل اندازه گیری
خازن
دیودها
و ...
فصل چهارم : میکرو کنترلر AVR
آشنایی با میکرو کنترلر
میکروکنترلر های AVR
آشنایی با محیط برنامه نویسی
برنامه نویسی به زبان C
برنامه نویسی از طریق محیط
محیط برنامه نویسی BASCOM-AVR
اصول ابتدیی برنامه نویسی
و ...
فصل پنجم : موتورهای الکتریکی
موتور های DC
موتور های پله ای
سروموتور
موتور DC بدون جاروبک
موتورهای خطی
موتور یونیورسال
و ...
فصل ششم : حسگر
حسگر های نوری
انکودر
حسگر اولتراسونیک
شتاب سنج ADXL202
حسگر دمای LM35
میکروسوییچ
و ....
فصل هفتم : مسابقات روباتیک
مسابقات روبات های تعقیب خط
مسابقات روبات های آتشنشان
مسابقات روبات های میکروماوس
مسابقات روبات های مین یاب
مسابقات روبو کاپ
فصل هشتم : طراحی و ساخت روبات امدادگر جونیور
آشنایی با مسابقات روبات ها
زمین مسابقه
ساختار روبات های مجاز
امتیاز بندی مسابقه
سی دی شامل :
فایل کد برنامه نویسینسخه کامل کدویژن و بسکام
کلیپ ویدئویی روبات ها
نرم افزار کمکی
قوانین مسابقات
اسلاید های اموزشی
>> معرفی کتاب برای شروع رباتیک
برای شروع به کار رباتیک ، کتاب « اصول و راهنمای رباتیک » ، پیشنهاد می شود . این کتاب برای مبتدی ها نوشته شده است . و سطح اطلاعات عمومی رباتیک خواننده را بالا می برد . این کتاب غیر تخصصی و غیر مهندسی است . اما برای شروع بسیار مناسب می باشد .
نام کتاب : اصول و راهنمای رباتیک
مولف : محمد مشاقی طبری
ناشر : کانون نشر علم
تعداد صفحه: ۱۵۲
توضیحاتی مختصر در مورد کتاب : کتابی که پیش رو دارید برای مطالعه علاقه مندان به علم روباتیک نگاشته شده است. این کتاب با مقدمه ای بر روباتیک و تاریخچه آن آغاز میشود. در فصل اول در ارتباط با برخی عملگرهای پرکاربرد در روباتیک و نحوه راه اندازی و کنترل آنها مطالبی بیان شده است. فصل دوم به بعضی از حسگرهای پرکاربرد و تشریح عملکرد کلی آنها می پردازد. در فصل سوم با میکروکنترلر آشنا می شوید و در فصل چهارم نحوه برنامه نویسی برای میکروکنترلرهای خانواده AVR را فرا می گیرید. فصل پنج به برخی از اصول کنترل که البته در روباتیک هم کاربرد دارند اختصاص داده شده است. در فصلهای هفتم و هشتم دو روبات می سازید؛ روبات تعقیب خط و روبات ماز.امروزه روباتیک با علوم مختلفی مانند هوش مصنوعی، شبکه های عصبی، الگوریتم های یادگیری ماشین و ... آمیخته شده است. در این کتاب مفاهیم اولیه و اصول ابتدایی ساخت روبات ذکر شده است که همگی مقدمه ای برای پیاده سازی روبات های پیشرفته تر می باشند.
سرفصل های این کتاب عبارتند از:
فصل اول : تبدیل انرژی الکترو مکانیکی
موتور های الکتربکی
موتورهای DC
موتور پله ای
فصل دوم : حسگرها
طبقه بندی حسگرها
انکدرهای نوری
پتانسیومتر
و ...
فصل سوم : آشنایی با میکروکنترلر
میکروکنترلر چیست ؟
میکروکنترلرهای AVR
خودتان پروگرامر بسازید
فصل چهارم : برنامه نویسی
بخش اول : مرجع کامپایلرC
مرجع زبان Cبخش دوم : محیط برنامه نویسی
Code Vision AVR
بخش سوم : برنامه نویسی
و ...
فصل پنجم : اصول کنترل
انواع سیستم های کنترلی
کنترلهای دووضعیتی
کنترلرهای تناسبی(P)
کنترلرهای انتگرالی (I)
و ...
فصل ششم : روبات تعقیب خط
روبات تعقیب مسیر چیست؟
مقادیر آنالوگ یا دیجیتال
تاثیرات نور محیط
میکرو کنترلر یا مدارات منطقی
و ...
فصل هفتم: روبات ماز
ماز چیست؟
طبقه بندی ماز
الگوریتم های حل ماز
پیاده سازی
چیدمان حسگرها
و ...
>> معرفی کتاب دانش کاربردی طراحی و ساخت ربات
نام کتاب : دانش کاربردی طراحی و ساخت ربات
مولفان : مهندس پویا حیرتی، مهندس ابوذر آقا جانی، مهندس محمد چیت سازان
ناشر : انتشارات آذرخش
ناشر همکار : انتشارات ارس رایانه
تعداد صفحه: ۴۵۲
شابک : ۰-۷۹-۶۲۹۴-۹۶۴-۹۷۸رده بندی کنگره : ۲د۹ح/TJ۲۱۱
شماره ثبت کتابخانه ملی :۸۶۱۴۵۳ح
چاپ اول : اردیبهشت ۱۳۸۷
سر فصل های این کتاب عبارتند از:
فصل اول: مکانیسم های متداول در ربات های متحرک
فصل دوم: بازوی مکانیکی سیار
فصل سوم: معرفی رابت پرنده و قطعات اساسی آن
فصل چهارم: مقدمه ای بر ربات های صنعتی
فصل پنجم: سیستم شاسی متداول
فصل ششم: مسائل موثر در وزن ربات
فصل هفتم: معرفی قطعات مکانیکی کاربردی
فصل هشتم: آشنایی با پنیوماتیک
فصل نهم:سیستم های سخت افزاری بینایی و شنوایی ربات
فصل دهم: استاندارد سازی طراحی ربات
فصل یازدهم: معرفی برخی از تکنیک های ساخت قطعات
پی نوشت:
- این کتاب، تنها کتاب موجود در بازار کتاب است که توسط یک ((مولف)) ایرانی و بر اساس شرایط و امکانات موجود در ایران و با استفاده از تجربه های عملی آزمایش شده نوشته شده است.
- متاسفانه چاپ این کتاب متوقف شده است و برای تهیه آن باید حضورا به دفتر انتشارات آذرخش مراجعه فرمایید. آدرس: تهران - خیابان انقلاب اسلامی - مقابل دانشگاه تهران - جنب خیابان دانشگاه - پاساژ فرشته - شماره ۱۳۲۰ شماره تماس : ۶۶۴۹۳۳۰۱ و 09127035576
>> معرفی کتاب ساخت اجزاء ربات
نام کتاب : ساخت اجزاء ربات
مولفان : Gordon McComb
مترجم : مهندس امین خوش نیت آرام
ناشر : انتشارات شهرآبناشر همکار : انتشارات نشر روز
تعداد صفحه: ۲۸۶
شابک : ۰-۸۷-۶۱۳۱-۹۶۴-۹۷۸
رده بندی کنگره : س۷۴م/TJ۲۱۱
شماره کتابشناسی ملی : ۲۰۳۰۱۶۵
توضیحاتی مختصر در مورد کتاب :
این کتاب اولین کتاب از دوره ۳ جلدی آموزش مباحث رباتیک DNA می باشد.
نویسنده مشهور کتاب های رباتیک آماتوری گوردن مک کامب در این کتاب کوشیده است هر آنچه را که یک خواننده مشتاق برای پیاده سازی ایده ذهنی اش نیاز دارد به زبان ساده بیان نمایید.
ضمنا با معرفی طیف وسیعی از ابزار , مواد گوناگون, شیوه های ساخت و ... شما را در دستیابی به طرحی عملی و علمی از یک ربات که بتواند با حداقل امکانات پیاده سازی شود , یاری می رساند.
صرف نظر از مدارهای کنترلی و سیستم های پیشرفته حرکتی , سایر اطلاعات مورد نیاز جهت ساخت بخش های مختلف یک ربات اعم از ساختارهای مختلف مکانیکی , نحوه انتخاب مواد مورد استفاده در ساخت قطعات , چگونگی استفاده از آنها و ... را میتوان در این کتاب یافت.
به بیان ساده , اطلاعات این کتاب نقطه شروع کسانی است که قصد ساخت ربات های آماتوری جهت پروژه های دانشجویی , دانش آموزی و یا شرکت در مسابقات رباتیک را دارند.
شکل مدل و اندازه ربات
مواد مناسب برای ساخت ربات
کار با مواد اولیه : فلز , پلاستیک
ابزار مورد نیاز طراحی و ساخت مدارهای الکترونیکی
ابزار دستی خاص
ابزار برقی خاص
انواع تیغه های مخصوص اره گرد میزی و دستی
ساخت بدنه ربات ها
چوب
لاستیک
نکات ایمنی استفاده از چسب ها
و ...
استفاده از بلوک های اسباب بازی
ساخت با استفاده از نوار چسب بست های
و ...
براکت ها
ساخت شاسی و اسکلت بندی
ربات با استفاده از چوب
شاسی و اسکلت بندی پلاستیکی
شاسی و اسکلت های فلزی
پروفیل های آلومینیومی
و ...
آرایش چرخ ها در سیستم حرکتی چرخ دار
انتخاب چرخ ها
هرزگردها
مدیریت وزن
و ...
ترکیبات شیمیایی باتری ها
باتری ها در یک نگاه
ولتاژ و جریان باتری ها
ترکیب باتری ها
و ...
زرد جوش و لحیم کاری
جوش کاری پلاستیک ها
ریخته گری پلاستیک
ریخته گری فلزات
تزیین ظاهر ربات
>> معرفی کتاب مقدمه ای بر ربات های سیار خودمختار

سر فصل های این کتاب عبارتند از:
فصل اول: مقدمه
فصل دوم: جابجاییفصل سوم: سینماتیک ربات های متحرک
فصل چهارم: ادراک
فصل پنجم: مکان یابی ربات های سیار
فصل ششم: برنامه ریزی و ناوبری
فصل هفتم:مراجع
معرفی پروفسور روح الله نوربخش:
پروفسور روح الله نوربخش، استاد رباتیک دانشگاه کارنگی ملون آمریکا (قطب رباتیک جهان) کتابی تحت عنوان قدمه ای بر ربات های سیار خودمختار به زبان انگلیسی با همکاری پروفسور رولند سیگوارت در سال 2004 از طریق انتشارات دانشگاه mit به چاپ رساند. اکنون این کتاب را به زبان فارسی نیز برگردانده است و آن را به تمام ایرانیان تقدیم نموده است.
تحقیقات اصلی پروفسور نوربخش در موضوع "تعامل انسان وربات" می باشد. پروفسور تمامی مقالات خود را جهت دانلود عموم به صورت رایگان در صفحه شخصی دانشگاه خود قرار داده است.همچنین ایشان با ناسا در پروژه ارسال هم زمان ربات و انسان به فضا و تعامل انسان و ربات در کاوش های فضایی همکاری می کند.
ایشان دارای سابقه تدریس دروس زیر به دانشجویان ارشد و دکترای رباتیک می باشند:
* آشنایی با ربات های پایه پویا
* برنامه نویسی ربات های پایه پویا
* اصول تعامل انسان و ربات
* اخلاق و رباتیک
>>معرفی کتاب مدلسازی و کنترل ربات
مولفان : مارک دبلیو. اسپانگ - ست هاچینسون - ام. ویدیاساگار
مترجم : دکتر ایرج حسن زاده "عضو هیئت علمی دانشگاه تبریز"
ناشر : انتشارات فن آذر
ناشر همکار : انتشارات آشینا
تعداد صفحه: 504
قطع : وزیری
شابک : 9786005552195
رده بندی کنگره : TJ211/35
شماره کتابشنای ملی : 2019233
چاپ اول : بهار 1389
توضیحات : این کتاب ، مرجع اصلی دو درس رباتیک و کنترل ربات ، رشته ی مهندسی رباتیک می باشد .
سرفصل های این کتاب عبارتند از:
- فصل اول : مقدمه
- فصل دوم : حرکت اجسام صلب و تبدیلات همگن
- فصل سوم : سینماتیک مستقیم و معکوس
- فصل چهارم : ژاکوبین ها
- فصل پنجم : طراحی حرکت و تولید مسیر
- فصل ششم: کنترل مفصل به فرم مستقل
- فصل هفتم : دینامیک
- فصل هشتم : کنترل چند متغیره
- فصل نهم : کنترل نیرو
- فصل دهم : کنترل غیر خطی هندسی
- فصل یازدهم : بینایی کامپیوتری
- فصل دوازدهم : کنترل سرو بینایی
در ذیل ساختار دو دوره ی آموزشی قابل تدریس با این کتاب پیشنهاد می شود :
- دوره ی آموزشی اول با نام درس مقدمه ای بر رباتیک شامل شش فصل اول مناسب دانشجویان سال آخر کارشناسی رشته های مهندسی برق ، مهندسی مکانیک ، مهندسی کامپیوتر .
- دوره ی آموزشی دوم با نام درس رباتیک پیشرفته شامل شش فصل دوم مناسب دانشجویان کارشناسی ارشد رشته های مهندسی کنترل ، مهندسی مکترونیک .
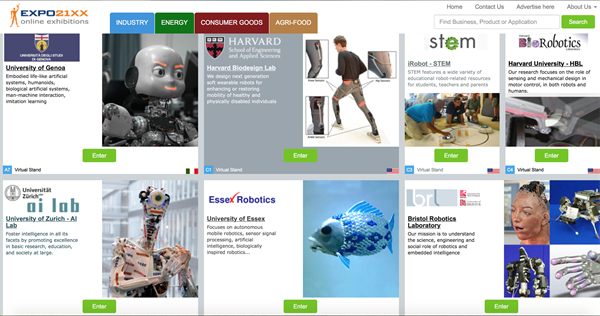
>>معرفی سایت EXPO21XX - نمایشگاه ((آنلاین)) رباتیک
این سایت نمایشگاه دائمی و انلاین تمام دانشگاههای معتبر رباتیک مثل ماسوچوست و کارنگی ملون، اوزاکا ژاپن و ... است، حتی قطب رباتیک دانشگاه شریف هم در این نمایشگاه غرفه (Hall) دارد و جدیدترین کارهای علمی خود را به صورت عکس و فیلم ارائه می دهد.
هر دانشگاهی که تحقیقات بیشتر و جالبتری داشته باشد در صدر قرار می گیرد، مانند آزمایشگاه بیو رباتMIT، دانشگاه مک گیل کانادا، EPFL، دانشگاه پلی تکنیک لوزان سویس و ...، همه و همه هستند و انواع ربات در این نمایشگاه آنلاین وجود دارد.
برای ورود به این سایت روی تصویر زیر کلیک کنید:
سلام
خیلی ممنون بابت اطلاعاتتون
و عالی بودن و درمواردی که مورد بحث قرار گرفته بود جامع
اما درمورد رشته کامپیوتر خیلی کم لطفی کرده بودین .
باسلام.احتیاج مبرم به طراح خلاقی دارم که بتواندقطعه ای کوچک نیمه رباطیک راطراحی کند. خواهشمندم چنانچه شخصی رامیشناسیدکه روی رباطها وسی ان سی هاکارمیکندازطریق ایمیل زیرمعرفی کنید.قبلاازراهنمایی شماکمال تشکررادارم.
madarsar@yahoo.com
تشکر .عالی بود
وبلاگ زیبایی داری به منم سر بزن
سلام
خیلی مطالب خوبی بودن
فقط دوتا فایل ها یکی هستند یعنی مهندس مکانیک با فایل زیریش یکیه اگر میشه رسیدگی کنید
با سپاس
از وبلاگ ما هم دیدن فرمایید.
سلام . مرسی با کمال میل